 手動車いすのシミュレーションモデル 担当:今里元信 |
傾斜装置による車いすの実験やアンケート調査の解析と同時に,手動車いすのシミュレーションモデルの開発を進めています。これは,車いすの駆動系並びにタイヤと床面との間の運動方程式を解くことにより,車いすの挙動や負担を求めています。高精度なシミュレーションモデルを開発することにより,船舶の動揺下など,実際に実験を行うことが難しい条件における性能評価ができるようになり,船内車いす移動の安全性と快適性の向上に役立つものと考えられます。
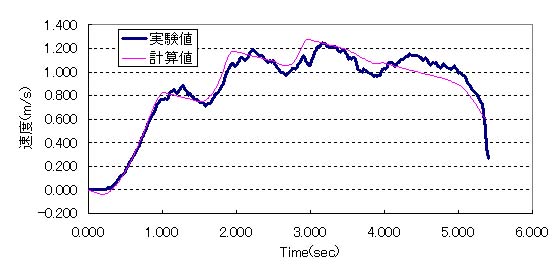 図 シミュレーション結果と実験結果の比較(一例) (上の画像をクリックすると大きい画像が表示されます。) |
| [ Barrier-free HOME ] [ NMRI HOME ] |
| このページに関するお問い合わせはimasato@nmri.go.jpまでお願いします |
