ターンテーブル操作マニュアル ターンテーブル操作マニュアルVer. Sept. 2003, by K. Hirata |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 1.はじめに
1.はじめにこのページでは,ターンテーブル(右下写真)を動かすための情報を掲載しています。通常,使用される方は,ターンテーブルの運転手順(Windowsプログラムの操作方法)だけを読めば十分です。本ページの後半では,サーボモータを動かすためのプログラムを変更するための情報を掲載しています。ターンテーブルの運動制御方法を変更する場合などに必要な情報です。
2.ターンテーブルの運転手順 ターンテーブル制御プログラム Ver.1.0の概要 ターンテーブル制御プログラム Ver.1.0の概要ターンテーブル制御プログラム(TurnTabxx.exe)は,パソコンの通信ポート(RS-232C)からサーボモータコントローラへコマンドを送ることで,ターンテーブルの回転運動,ロール運動(X),ピッチ運動(Y)のON/OFFおよびそれらの速度(周波数)を制御するWindows用プログラムです。さらに,それぞれのサーボモータの初期位置を調整するための原点モード(現状のマイコンプログラムでは使用不可),同期モータの初期位置を調整するための同期モータ調整モードがあります。
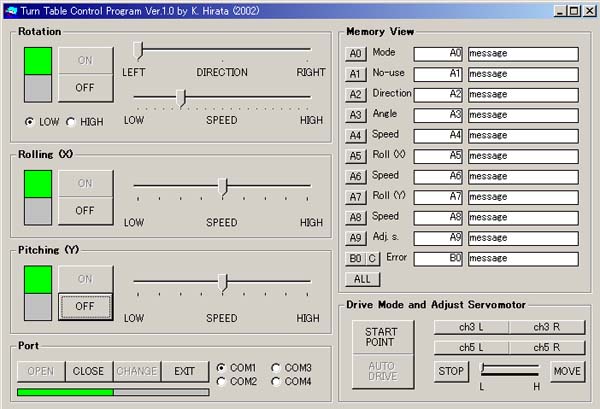 Turn Table Control Program Ver.1.0 通信ポートと変数(メモリ)の読み込み画面左下のPortは,操作パソコンの通信ポートを変更する場合に使用します。画面右上のMemory Viewは,サーボモータコントローラ内の変数を読み込むコマンドボタンが配置されています。これらは通常の操作では使用しません。 同期モータ調整モードについてターンテーブルの始動時には,同期させるサーボモータ(ch3,ch5)の初期位置をch2,ch4のサーボモータの位置に合わせておかなければいけません。全てのサーボモータは時計回りに回転しますので,スコッチ・ヨーク機構の位置を見れば,初期位置が適切かどうか判断できます。初期位置がずれている場合は,画面右下のch3 L,R(ch3の左回転,右回転),ch5 L,R(ch5の左回転,右回転)をクリックし,運転(MOVE),停止(STOP)の操作を行います。なお,正常に動作している場合には同期モータを調整する必要はありません。 原点モードとセンサーについて回転運動,ロール運動,ピッチ運動には初期位置を検知するためのセンサーが取り付けられています。そのセンサーの信号を読み取り,初期位置を自動調整するのが,原点モード(START POINT)です。しかし,このモードは現バージョンのマイコンプログラムでの動作確認をしていませんので,使用しないでください。 3.RS-232Cの設定
4.サーボモータコントローラのマイコンプログラムプログラム概要サーボモータの動作は,サーボモータコントローラのマイコンプログラムで設定されています。通常の操作は,コントローラ内の変数を通信ポート経由で変更することで行います。すなわち,変数が変更されたときの動作をサーボモータコントローラのマイコンに書き込んでいます。 プログラム作成マイコンプログラムの作成は,一般のテキストエディタで行います。ソースプログラムはQMCL言語という特殊な言語で書かれています。作成したプログラムをマイコンに書き込む際,NEC PC98シリーズのN88-BASICプログラムを使用しますので,DOS版のエディタ(VZ)を使用しています。ソースファイルの拡張子は「.S」とします。なお,CH1(回転)にはFUNE1xx.S,ロール(X1)にはFUNE2xx.S,ロール(X2)にはFUNE3xx.S,ピッチ(Y1)にはFUNE4xx.S,ピッチ(Y2)にはFUNE5xx.Sを作成します。現状のソースファイルは以下の通りです。 FUNE1C.S FUNE2C.S FUNE3J.S FUNE4C.S FUNE5J.S コンパイルQMCL.BASで16進コードにコンパイルします。ソースファイルのコンパイルは,QMCL.EXE(PC98 MS-DOS版)を使用します。QMCL.EXEを起動し,コンパイルを選択します。以下のQMCL2.BASは,キュー・エム・ソフト社のオリジナルプログラムをわずかに変更したプログラムですが,機能や操作方法は変わりありません。 QMCL2.BAS プログラムの送信
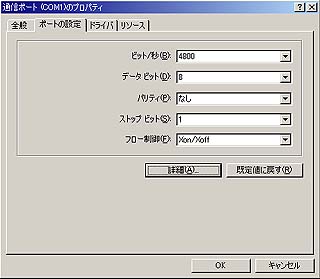
プログラムの動作確認マイコンプログラムの動作確認を行う場合,RS-232Cのコマンドを直接送ることができるRSDEMO3.BAS (EXE)が便利です。RSDEMO3.BASは,キュー・エム・ソフト社のサーボモータ制御プログラムRSDEMO.BASをわずかに修正したプログラムです。プログラム実行後,「RSDEMO=0」を選択し,上記のRS-232Cのコマンド(チャンネル番号も指定)を入力することでサーボモータコントローラと通信ができます。 RSDEMO3.BAS 変数の変更方法サーボモータコントローラの変数を変更する場合,指定された通信条件(4800 bps,データビット長 8,パリティチェックなし,ストップビット長 1,Xパラメータ有効)で,チャンネル指定番号(全て=0)にメモリ番号,設定値,C/R,L/Fをつけて送信します。例えば,ピッチ運動(変数A5)を開始(=1)とする場合は0 A5 1【C/R】【L/F】,回転速度(変数A4)を20に設定する場合は0 A4 20【C/R】【L/F】となります。 メモリの設定値を読み込む場合,チャンネル指定番号(全て=0),メモリ番号,C/R,L/Fを入力します。例えば,回転(A1)のメモリを調べる場合0 A1【C/R】【L/F】となります。 なお,キュー・エム・ソフト社の動作確認用プログラムRSDEMO.BASでは,プログラム内で0を加えているため,最初のチャンネル指定番号(全て=0)をつけません。 変数一覧変数A0 全てのサーボモータで使用しています。A0=1は原点モード,A0=2が自動モード(通常の運転)です。電源を入れた直後の状態(デフォルト)では,全チャンネルともA0=2 にしています。 A0=3〜6は,同期モータ(3ch,5ch)の位置調整モードであり,変数A9(回転速度,HZP)と同時に使います。A0=3は3chモータの右回転,A0=4は3chモータの左回転,A0=5は5chモータの右回転,A0=6は5chモータの左回転です。 変数A1 現バージョンでは未使用です 変数A2 回転運動(1ch)のON/OFFおよび回転方向を指定します。A2=0で停止,A2=1で左回転(モータが反時計回り),A2=2で右回転(モータが時計回り)です。 変数A3 現バージョンでは未使用です。 変数A4 回転運動(1ch)の速度を指定します。数値が小さいほど速くなります。 変数A5 ロール運動(2ch)に使用します。A5=1でスタート,A5=0でストップです。 変数A6 ロール運動(2ch)の速度を指定します。5〜20(sec)の範囲で設定し,数値が小さいほど速くなります。3chのサーボモータでも使用していますので,全チャンネル指定で変数設定をします(例:0A610など)。 変数A7 ピッチ運動(4ch)に使用します。A7=1でスタート,A7=0でストップです。 変数A8 ピッチ運動(4ch)の速度を指定します。5〜20(sec)の範囲で設定し,数値が小さいほど速くなります。5chのサーボモータでも使用していますので,全チャンネル指定で変数設定をします(例:0A810など)。 変数A9 位置調整モード(A0=3〜6)の場合,同期モータの位置修正速度(HZP)を指定します。50,100,200程度の値に設定し,値が大きいほど速くなります。
5.サーボモータコントローラのユーザメモリユーザメモリの設定方法ロータリエンコーダの係数やその他の動作条件などのパラメータを設定する必要があります。その操作は,サーボモータコントローラのキーボードから次のように行います。
以上で設定されるパラメータは,内部バッテリが適切な電圧に保たれていれば消えることはありません。
その他の設定内部バッテリが完全になくなってしまった場合など,以下の設定をする必要があります。 【END】→【CR】 F0→【CR】 画面左に「000」と表示されます。その状態で, 000 F065FF→【↓】 001 F7CF04→【↓】 002 F7CF04→【↓】 003 F7CF04→【↓】 004 FDD004→【↓】 005 A0D004→【↓】 006 A1D000→【↓】 007 A2D000→【↓】 008 A3D000→【↓】 009 A4D050→【↓】 010 A5D000→【↓】 とします。その後,マイコンプログラムを転送してください。
6.サーボモータコントローラの基本操作プログラム開始マイコンに書き込まれたプログラムは,電源投入と同時に起動します。その他の方法としては,サーボモータコントローラのキーボードから, 【JOB】→【CR】 とします。 プログラム終了マイコンに書き込まれたプログラムを終了させる場合,サーボモータコントローラのキーボードから, 【END】→【CR】 とします。
7.おわりに実験室にターンテーブルを搬送し,内部バッテリの交換等を行い,かなり安定して動くようになりました。しかし,同期運転(位置補正の感知と制御の有無),パソコンとサーボモータコントローラとの通信エラー,あるいはサーボモータコントローラのI/O電源などにやや不安な面が残されています。今後も,様々な実験に使用できるように装置やプログラムの改良等を進めていきたいと考えています。 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| [Back] [Barrier-free HOME] | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||