ワンチップマイクロコンピュータを使った実験装置
第4章 マイクロコンピュータを使った実験装置例
4.2 パルスモータを動かしてみよう(PIC)
 はじめに はじめに
 PICマイクロコンピュータを使って,パルスモータ(ステッピングモータとも言う)を駆動させます。パルスモータは,直流モータとは異なり,回転角度制御ができますので,精度の高い運動をさせるのに適しています。そのため,パルスモータはその他の様々な用途で使うことができます。
PICマイクロコンピュータを使って,パルスモータ(ステッピングモータとも言う)を駆動させます。パルスモータは,直流モータとは異なり,回転角度制御ができますので,精度の高い運動をさせるのに適しています。そのため,パルスモータはその他の様々な用途で使うことができます。
なお,今回製作したパルスモータ駆動回路は,特殊な形式の実験用スターリングエンジン(セミフリーピストン形)のピストンを駆動するために使用しています。スターリングエンジンの詳細については4.9節またはリンクページをご覧ください。
パルスモータの制御信号
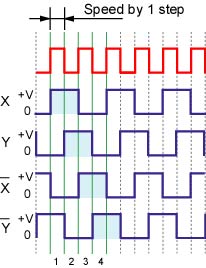 パルスモータには様々な種類があるようです。ここで使用するのは,「2相励磁」の「ユニポーラ駆動」という形式のパルスモータ(型番55SPM23D7,秋月電子で購入)です。このパルスモータは,右図のように位相がずれた4相のパルスを入力することで,決められた運動をします。すなわち,PICでこれらのパルスを発生させれば,パルスモータを任意に駆動することができるのです。
パルスモータには様々な種類があるようです。ここで使用するのは,「2相励磁」の「ユニポーラ駆動」という形式のパルスモータ(型番55SPM23D7,秋月電子で購入)です。このパルスモータは,右図のように位相がずれた4相のパルスを入力することで,決められた運動をします。すなわち,PICでこれらのパルスを発生させれば,パルスモータを任意に駆動することができるのです。
すなわち,右図のように1周期を4等分すると,1/4周期で上のパルスから「1,0,0,1」となり,2/4周期で「1,1,0,0」,3/4周期で「0,1,1,0」,4/4周期で「0,0,1,1」の出力をすることになります。(1=+V,0=0Vです。わかりにくくて申し訳ありません。)このような周期で連続的にパルスを発生させることで,一定速度の回転が得られます。
パルスモータについては,秋月電子の「汎用ステッピングモータドライブキット」の説明書やパルスモータの説明書に詳しく書かれています。なお,今回試作したパルスモータ駆動回路には,同キットに含まれている部品を多用しています。
パルスモータを動かすための回路
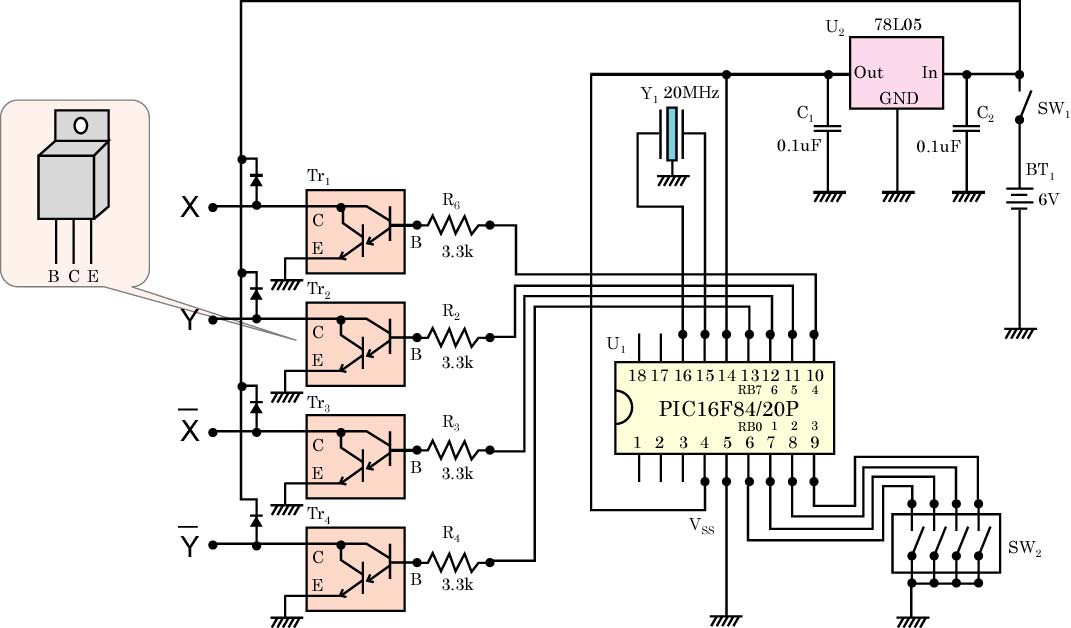
第3章で紹介したPICの基本回路の出力端子(RB4〜RB7)にパルスモータ駆動用のダーリントン型トランジスタ(汎用ステッピングモータドライブキット内部品)を取り付けました。下図がその回路図です。
パルスモータ駆動回路
(画像をクリックすると大きい画像が表示されます)
|
右写真は試作したパルスモータ駆動回路の外観です。入力用として,4Pディップスイッチがつけられています。また,上の回路図にはありませんが,動作確認用の発光ダイオードもつけられています。以下のサンプルプログラムでは,入力ポートのRB0〜RB3で回転速度の設定ができるようにしました。
サンプルプログラム:pulse01.bas
|
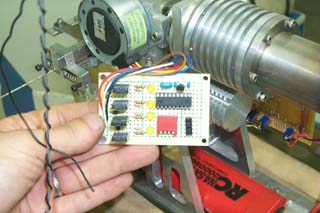
パルスモータ駆動回路の外観
|

秋月電子電商
スターリングエンジンのページ(海技研)
|