ワンチップマイクロコンピュータを使った実験装置
第4章 マイクロコンピュータを使った実験装置例
4.5 消費電力測定 〜A/D変換機能を使う〜(AVR)
 はじめに はじめに
 実験用魚ロボットPF-700の性能測定をするため,4.4節で製作した周波数測定装置をベースにして,直流モータの消費電力を測定する機能を加えます。消費電力を測定するためには,A/D変換機能を使います。AT90 S2313-10PCにはA/D変換機能がありませんので,ここではAVR AT90 S8535-8PC(40pin)を使用し,回路を製作しました。
実験用魚ロボットPF-700の性能測定をするため,4.4節で製作した周波数測定装置をベースにして,直流モータの消費電力を測定する機能を加えます。消費電力を測定するためには,A/D変換機能を使います。AT90 S2313-10PCにはA/D変換機能がありませんので,ここではAVR AT90 S8535-8PC(40pin)を使用し,回路を製作しました。
消費電力の測定
 直流モータの消費電力(W)は,モータ両端の電圧Vf(V)と内部の電流I(A)との積で求められます。A/D変換機能は電圧を測る機能ですので,電流を直接測定することはできません。
直流モータの消費電力(W)は,モータ両端の電圧Vf(V)と内部の電流I(A)との積で求められます。A/D変換機能は電圧を測る機能ですので,電流を直接測定することはできません。
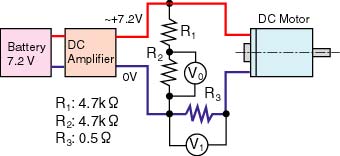
右図は今回製作した消費電力を測定するための回路です。実験用魚ロボットPF-700は7.2Vのバッテリを使用し,マブチRS-540モータ(消費電流6.0A,カタログ値)を駆動しています。マイクロコンピュータの作動電圧よりも直流モータ用のバッテリ電圧の方が高いので,2本の抵抗R1,R2をつなげて測定電圧V0を1/2に下げています。これらの抵抗は,抵抗値が大きく(今回は4.7kΩ),しかも同じ値でなければいけません。抵抗値が小さいと直流モータに電流が流れにくくなります。
電流Iを測定するために,右図のように抵抗R3を取り付けます。直流モータ内を流れる電流と抵抗R3を流れる電流とは等しくなりますので,抵抗R3の両端の電圧V1を測定することで,電流I(=V1/R3)を求められます。
なお,モータ両端の電圧Vfは,測定電圧V0の2倍から電圧V1を差し引いた値となります(Vf=2V0-V1)。
製作した消費電力測定装置
右の写真は,実験用魚ロボットPF-700の直流モータと消費電力測定用の抵抗です。電流測定用の抵抗R3には大電流が流れるため,2本の1Ωセメント抵抗を使用しました。
|

直流モータと消費電力測定用の抵抗
|
|
右の写真は,製作した消費電力測定回路の外観です,回路や入出力ポートについての説明は省略しますが,基本的には4.4節の回路のマイクロコンピュータをAT90 S8535-8PCに置き換え,2本のアナログ入力ポートに電圧V0とV1を接続しています。詳細については,サンプルプログラムを参照してください。
サンプルプログラム:pf700d.bas
|

消費電力測定回路の外観
|

魚ロボット・ホームページ
実験用魚ロボットPF-700のページ
|