ワンチップマイクロコンピュータを使った実験装置
第4章 マイクロコンピュータを使った実験装置例
4.8 パルスモータ駆動の模型車いす(AVR)
 はじめに はじめに
 4.1節で紹介したパルスモータ駆動回路を使って,模型車いすを製作しました。左右の車輪にそれぞれ1つづつのパルスモータ(型番55SPM23D7,秋月電子で購入)を使用し,それぞれに1つづつのパルスモータ駆動回路を使いました。さらに2つのパルスモータ駆動回路を制御するために,別のAVR回路を製作しました。
4.1節で紹介したパルスモータ駆動回路を使って,模型車いすを製作しました。左右の車輪にそれぞれ1つづつのパルスモータ(型番55SPM23D7,秋月電子で購入)を使用し,それぞれに1つづつのパルスモータ駆動回路を使いました。さらに2つのパルスモータ駆動回路を制御するために,別のAVR回路を製作しました。
模型車いすの基本構成
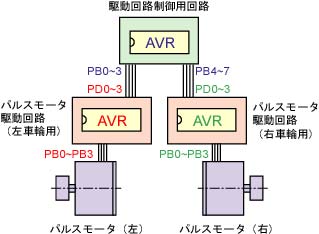 今回試作した模型車いすは,車輪の運動(回転角度)を正確に設定する必要があります。そのため,左右車輪をパルスモータで駆動することとしました。右図に示すように,パルスモータには4.1節で紹介したパルスモータ駆動回路を若干修正した回路(後で説明)が接続されています。4.1節で紹介した回路は基板上のディップスイッチをパルスモータ運動の入力信号として使用していました。模型車いすでは,ディップスイッチの代わりに,もう1つのAVR回路(駆動回路制御用回路)を製作し,プログラム通りの運動をさせることにしました。
今回試作した模型車いすは,車輪の運動(回転角度)を正確に設定する必要があります。そのため,左右車輪をパルスモータで駆動することとしました。右図に示すように,パルスモータには4.1節で紹介したパルスモータ駆動回路を若干修正した回路(後で説明)が接続されています。4.1節で紹介した回路は基板上のディップスイッチをパルスモータ運動の入力信号として使用していました。模型車いすでは,ディップスイッチの代わりに,もう1つのAVR回路(駆動回路制御用回路)を製作し,プログラム通りの運動をさせることにしました。
すなわち,駆動回路制御用回路の出力ピンPB0~PB3を左車輪用のパルスモータ駆動回路の入力ピンPD0~PD3に接続し,駆動回路制御用回路の出力ピンPB4~PB7を右車輪用のパルスモータ駆動回路の入力ピンPD0~PD3に接続しています。
【補足:模型車いすについて】
車いすには手動式(手漕ぎ式)と電動式があります。ここでは電動車いすを想定した模型を紹介しています。私たちは,動揺している船の上で車いすが安全に移動できるのかを調べるための研究を進めています。小型の模型車いすを使うことで,小さい動揺台で実験をすることができ,詳細なデータを測定することができると考えています。今回試作した模型車いすは,実際の電動車いすをそのまま小さくしているわけではありませんので,その走行特性は実際のものとはかなり違うかもしれません。しかし,後輪が駆動され,前輪にキャスタ(旋回方向が自由に回転する車輪)を使用した「自動車」の特性を調べることができると考えています。
|
模型車いすに使用する2種類の回路
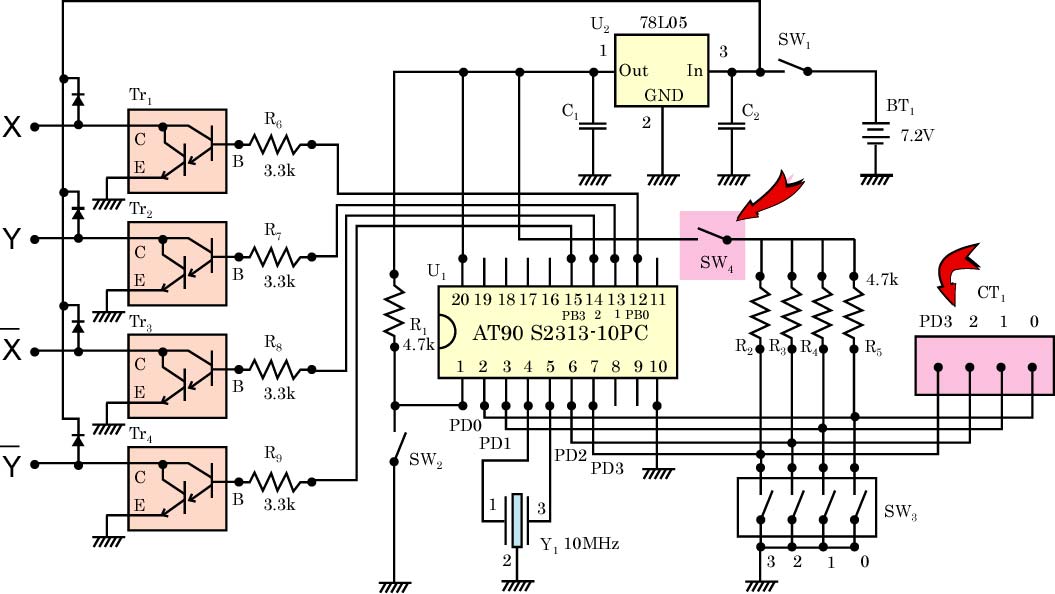
下図は,4.1節で紹介したパルスモータ駆動回路を,駆動回路制御用回路でコントロールするために,若干修正した回路です。修正個所は,入力ピンにかかる電圧を遮断するためのスイッチSW4を取り付けたことです(図中,赤矢印で表示)。また,入力信号を取り入れるためにコネクタCT1を接続しています(図中,赤矢印で表示)。駆動回路制御用回路でコントロールする際は,スイッチSW4とスイッチSW2の全てをOFFにしておく必要があります。
サンプルプログラム1:pulse01.bas
パルスモータ駆動回路
(画像をクリックすると大きい画像が表示されます)
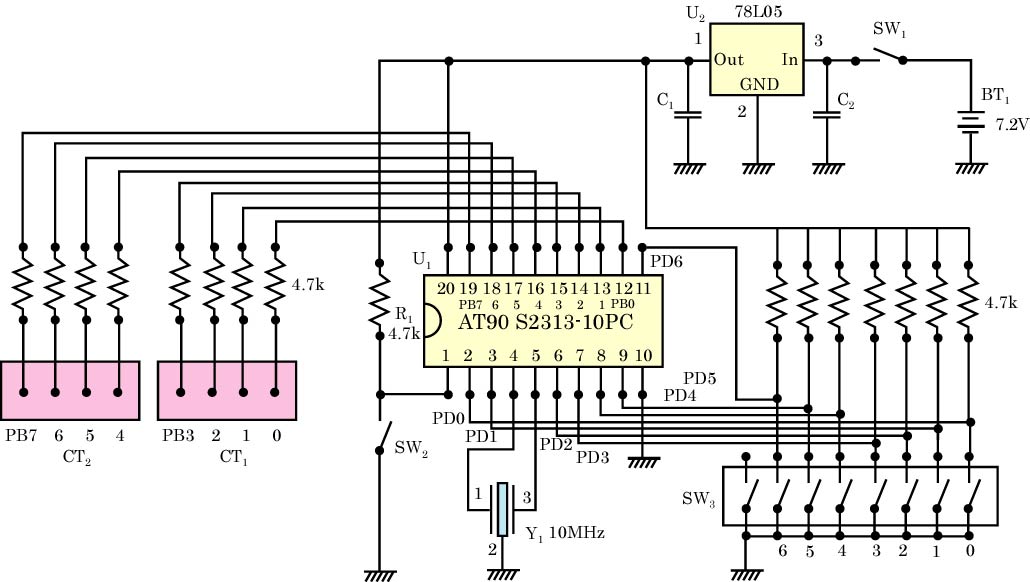
下図は駆動回路制御用回路です。配線は多いのですが,ポートBを出力に使い,ポートDを入力につないでいるだけです。以下のサンプルプログラムは動作確認用に作成したものですので,賢い動きをさせることはできません。
サンプルプログラム2:motwc01.bas
サンプルプログラム3:motwc02.bas
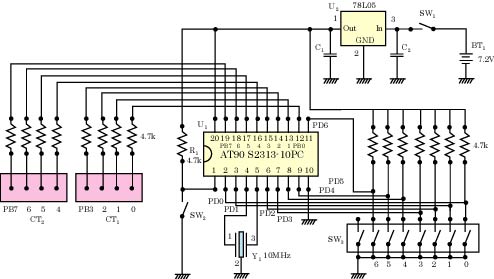
パルスモータ駆動回路を制御するための回路
(画像をクリックすると大きい画像が表示されます)
おわりに
下の写真は試作した模型車いすです。座席後方に3枚のAVR基板がつけられています。下の2枚がパルスモータ駆動回路,上の1枚が駆動回路制御用回路です。パルスモータのパワーが小さいため,速いスピードで動かすことはできませんが,ゆっくりとプログラム通りの運動ができることを確認しました。さらにAVRのプログラム等を改良することで,動揺実験に適した模型車いすになると考えています。
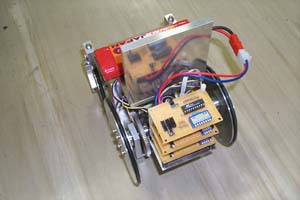
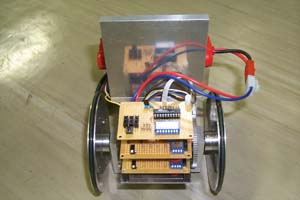
模型車いすの外観

秋月電子電商
旅客船バリアフリーのページ(海技研)
|