ワンチップマイクロコンピュータを使った実験装置
第4章 マイクロコンピュータを使った実験装置例
4.10 ロータリエンコーダの信号処理(AVR)
 はじめに はじめに
 旅客船バリアフリーの研究を進める中で,車輪の回転角度とトルクを測定できる計測用車いすを開発しました。最終的に測定結果はパソコンで処理されますが,その途中の過程でAVRマイクロコンピュータを使用し,信号処理をしています。
旅客船バリアフリーの研究を進める中で,車輪の回転角度とトルクを測定できる計測用車いすを開発しました。最終的に測定結果はパソコンで処理されますが,その途中の過程でAVRマイクロコンピュータを使用し,信号処理をしています。
ロータリエンコーダの信号
 ロータリエンコーダはモータのような形状をしています。そして,回転軸を外から回してやることで,その回転角度を正確に測定することができます。計測用車いすに使用したロータリエンコーダは,インクリメンタル形と呼ばれる形式です(オムロン社,形E6C2-CWZ3E,2000P/R)。
ロータリエンコーダはモータのような形状をしています。そして,回転軸を外から回してやることで,その回転角度を正確に測定することができます。計測用車いすに使用したロータリエンコーダは,インクリメンタル形と呼ばれる形式です(オムロン社,形E6C2-CWZ3E,2000P/R)。
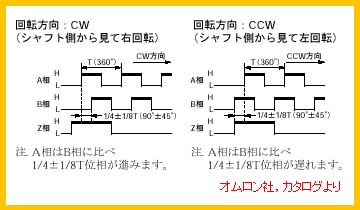
ロータリエンコーダに直流5〜12Vの電源を接続し,回転軸を外から回してやると,A相,B相,Z相という3相のパルスが出力されます。右図に示すように,A相とB相のパルスは位相がずれていて,今回使用したロータリエンコーダでは1回転に2000個のパルスを発生します。すなわち,A相の電圧を常に監視して(実際にはとても短い時間間隔で監視して),A相の電圧が0Vから5V(電源電圧)になったとき(実際にはなった直後),B相が5V(電源電圧)であれば,360/2000度(=0.18度)だけ正回転したことになります。逆に,A相の電圧が0Vから5Vになったとき,B相が0Vであれば,0.18度だけ逆回転したことになります。これをマイクロコンピュータで処理するのです。
計測用車いすの測定装置
手動車いすの基本的な運動特性を把握するため,左右の車輪に加えるトルクと車輪の回転角度を測定できる車いすを開発しました。
右図は計測用車いすの測定装置系統です。車輪の回転角度の検出にはロータリエンコーダを使用しています。AVRマイクロコンピュータは,ロータリエンコーダとパソコンの間に使用しています。2個のAVRを使用しているのは,左右車輪の回転角度を別々に処理しているためです。
|
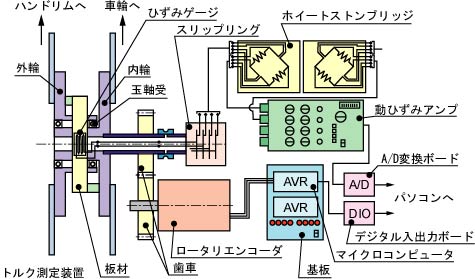
測定装置系統
|
|
なぜ,ロータリエンコーダの信号をパソコンのデジタル入出力ボードに直接取り込まず,マイクロコンピュータを使う必要があるのでしょうか?
パソコンにはA/D変換ボードとデジタル入出力ボードが取り付けられています。車いすの走行特性を測定するためには,両方のボードに入力される信号を同時に取り込まなければなりません。ロータリエンコーダの信号をデジタル入出力ボードに直接取り込むと,同時に処理をするのがとても難しくなります。
ロータリエンコーダの信号をパソコンのA/D変換ボードに取り込むこともできます。しかし,その場合,かなり速いサンプリング周波数(測定間隔)でデータを取り込まなければなりません。
したがって,マイクロコンピュータを使うことで,パソコンの処理をかなり軽くしているのです。
|
試作した信号処理装置
回転角度の測定には,1回転に2000個のパルスを発生するインクリメンタル形ロータリエンコーダを使用しています。右写真に示すように,ロータリエンコーダは,回転軸から歯車を介して取り付けられています。
ロータリエンコーダは,約90°の位相がずれた2相のパルス(A相,B相)を発生します。2相のパルスは,マイクロコンピュータに入力された後,12ビット(4096カウント)の信号に変換され,ノートパソコンのデジタル入出力ボードに取り込まれます。
|

ロータリエンコーダ
|
|
マイクロコンピュータ(ATMEL社,AT90 S2313-10PC)には,ロータリエンコーダから出力される2相のパルス(A相,B相)を入力し,12ビット(4096カウント)の信号に変換するプログラムが書き込まれています。プログラムはATMEL社のAVR用BASICコンパイラで作成されています。回路や入出力ポートについての説明は省略しますが,ソースプログラムは以下の通りです。
サンプルプログラム:wchairb.bas
|
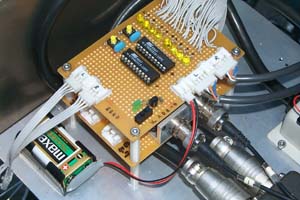
信号処理回路の外観
|

旅客船バリアフリー・ホームページ
オムロンのホームページ
|