ワンチップマイクロコンピュータを使った実験装置
第4章 マイクロコンピュータを使った実験装置例
4.13 手動車いす走行補助装置(AVR)
 はじめに はじめに
動揺している船舶において手動車いすを運転する場合,その操作は著しく難しくなり,暴走・転倒といった危険性が高まります。このページでは,動揺条件下において暴走を防止するための走行補助装置を紹介します。様々な走行補助装置を考えましたが,ここで紹介するのは,車いすのブレーキ操作を傾斜角に応じたマイコン制御を行う装置です。
|

|
走行補助装置の概要とAVR回路
 走行補助装置の構造 走行補助装置の構造
図1に走行補助装置の構造を示します。実際の車いすを動揺条件下で操作する場合,状況に応じてブレーキ力を調整する必要があります。本装置では,マイクロコンピュータ(AVR AT90 S2313-10PC)とラジコン模型用サーボモータ(フタバ,S3801)を用いることにより,任意にブレーキ力を調節できる構造としています。また,振り子を応用した傾斜角センサを製作し,車いすの左右方向の傾斜角度が約3度及び5度の際に2段階でマイクロスイッチが作動します。このスイッチの組み合わせをマイクロコンピュータで読み取り,サーボモータの運動を制御しています。
図2に走行補助装置の外観を示します。本装置は,サーボモータによるブレーキ機構,AVR回路および傾斜角センサから構成されています。図3に示すように,傾斜角センサには,やや大きめの振り子(S45C製)が取り付けられています。
|
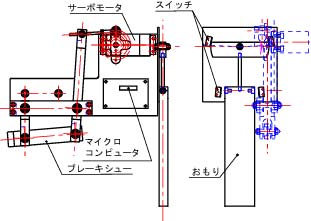
図1 走行補助装置の構造
|
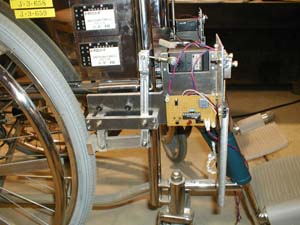
図2 走行補助装置の外観
|

図3 傾斜角センサの外観
|
AVR回路
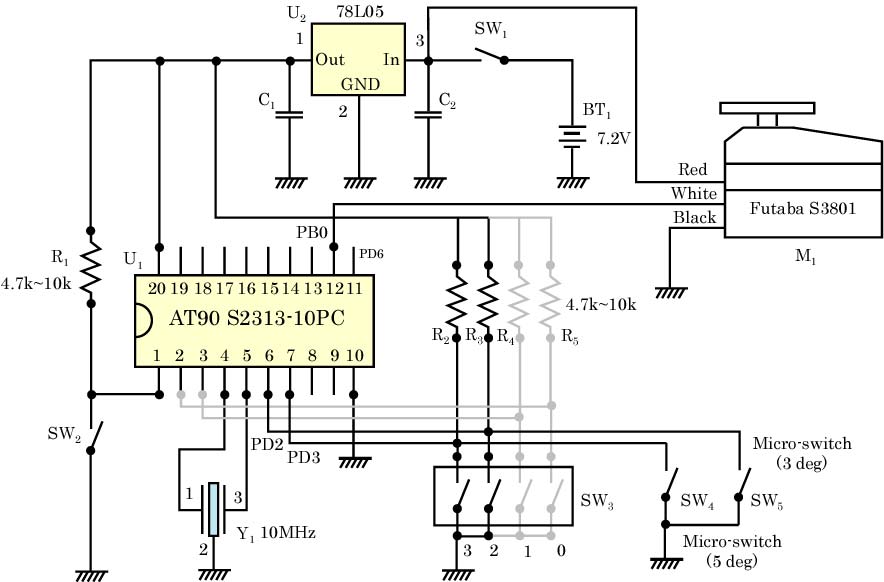
走行補助装置に搭載しているAVR回路は,第2章で紹介した回路に数本の入出力の配線を加えた簡単な回路です(図4)。入力用スイッチに傾斜角センサのマイクロスイッチを使用し,出力用発光ダイオードの代わりにラジコン模型用サーボモータの信号線(白線)を接続しています。マイクロスイッチの入力ピンにはPD2〜PD3,サーボモータへの出力ピンにはPB0を使用しています。また図中のSW3は,動作確認用(プログラム開発用)のディップスイッチです。
|
図4 AVR回路
画像をクリックすると大きい画像が表示されます。
|
サンプルプログラムの詳細
以上のAVR回路に書き込んだプログラム(ATMEL社AVR用BASICコンパイラ)を紹介します。基本的には,入力ピンPD2〜PD3の信号(ON/OFF)を読みとり,4.3節で紹介したR/Cサーボモータを動かすためのパルスを2段階でピンPB0に出力します。
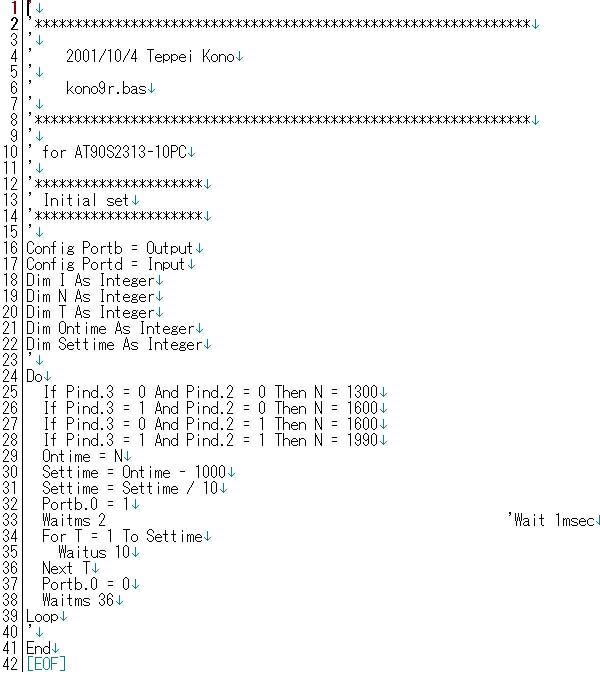
1行〜15行は,REM文(プログラム上意味のない文)です。16行〜17行はピンの入出力の設定をしています。18行〜22行は使用する変数の定義をしています。このプログラムでは全て整数(Integer)で使用しています。24行〜39行は,PD2〜PD3の信号(ON/OFF)を読みとり,ピンPB0に信号を送るループ(繰り返し)です。
|
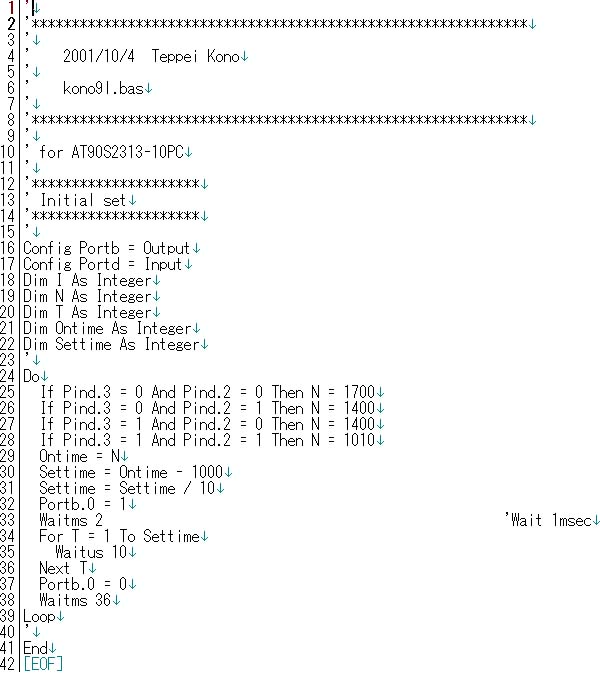
以下のプログラムは,左後輪走行補助装置のAVRに書き込んだプログラムです。右後輪用と異なるのは,サーボモータに送るパルス幅の設定値です。
おわりに
以上のように,ON/OFFのマイクロスイッチであっても,簡易的なセンサとして機能することがおわかりいただけたかと思います。しかし,このような車いす走行補助装置の高性能化を目指す場合には,重力加速度センサなどを利用し,より詳細なマイコン制御を行うことがよいのは明らかです。
なお,本走行補助装置は,当時研修生として海上技術安全研究所に来所していた河野哲平君(法政大学工学部機械工学科4年生)と開発しました。

旅客船バリアフリーのページ(海技研)
|