|
| ||||||||||
|
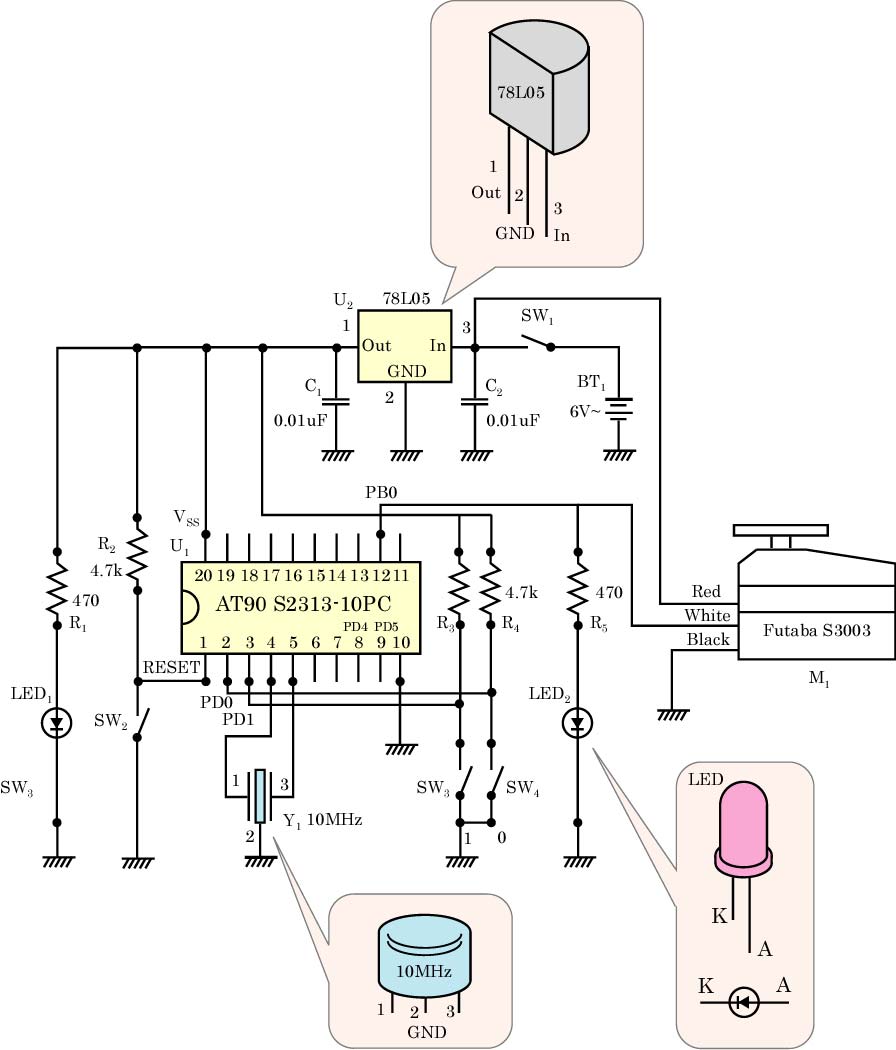
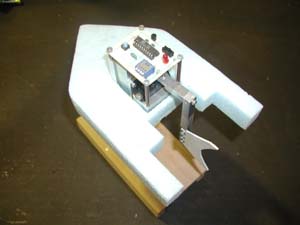
儚儞僠僢僾儅僀僋儘僐儞僺儏乕僞傪巊偭偨幚尡憰抲 戞4復 儅僀僋儘僐儞僺儏乕僞傪巊偭偨幚尡憰抲椺
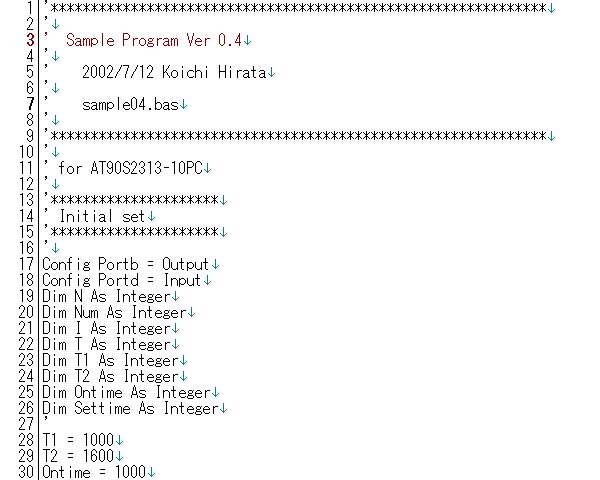
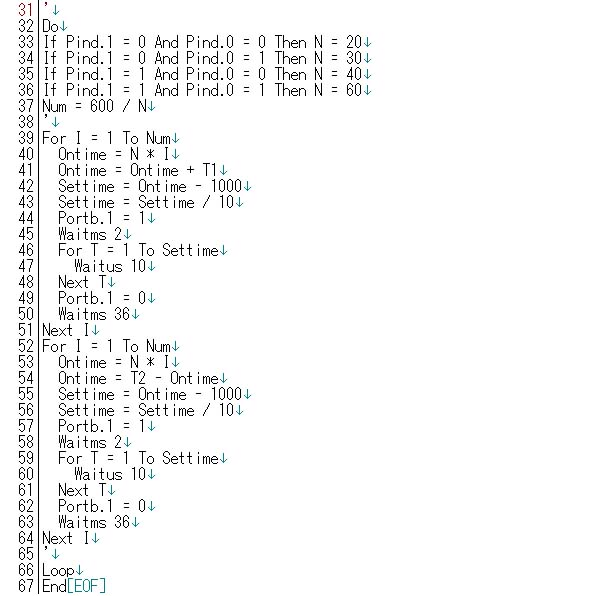
 僒儞僾儖僾儘僌儔儉 僒儞僾儖僾儘僌儔儉丂埲忋偺AVR夞楬偵彂偒崬傫偩僾儘僌儔儉乮ATMEL幮AVR梡BASIC僐儞僷僀儔乯傪徯夘偟傑偡丅婎杮揑偵偼丆擖椡僺儞PD0乣PD1偺怣崋乮ON/OFF乯傪撉傒偲傝丆R/C僒乕儃儌乕僞傪摦偐偡偨傔偺僷儖僗傪楢懕揑偵曄壔偝偣側偑傜僺儞PB1偵弌椡偟傑偡丅
| ||||||||||
|
[ Microcomputer ] [ Hirata HOME ] [ Power and Energy Engineering Division ] [ NMRI HOME ] | ||||||||||
|
| ||||||||||
| Contact khirata@nmri.go.jp |