Assistance Device with Limited Slip Differential Gear
October 2002, Koichi Hirata and Yasuo Takada

 Outline of This Study
Outline of This Study
When a wheelchair is driven on a waving ship, the operation becomes very hard, and it is highly dangerous. In this web page, we introduce the assistance device with a Limited Slip Differential Gear (LSD) for a hand-operated wheelchair.
Characteristics of a Wheelchair and Assistance Device
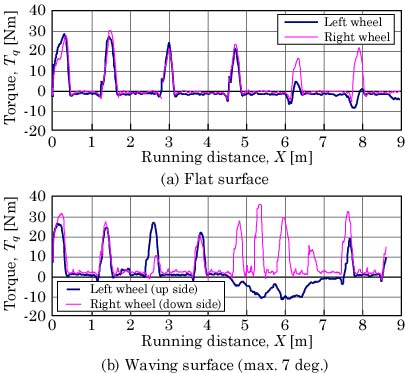
When a wheelchair is located on a slope at crossing direction, it is affected gravitation, and received a turning moment to down side. The figure to the right shows experimental results of driving torque on a flat surface and a waving surface (Simple Experimental Slope to Image a Waving Ship). From this figure, in the case of the flat surface, the wheelchair runs with the similar torque to both wheels. On the other hand, in the case of the waving surface, the down-side wheel is strongly forced driving torque, and the up-side wheel is forced brake torque on the slope. These complex operations cause a hard operation on a slope or a waving condition.
|
Experimental Results of Wheelchair Operations
|
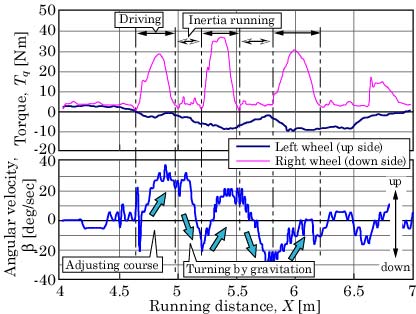
The figure to the right shows the experimental results of the torque and angular velocity of the wheelchar on the waving surface. From the figure, the angular velocity increases at driving conditons, and decreases at inertia conditions. This means that the wheelchair is turned by gravitation at the inertia conditions, and the driver revises the direction at the driving conditions.
|
Driving Torque and Angular Velocity on the Waving Surface
|
Based on above discussions, it is considered that the decreasing of the turning by gravitation brings safty and comfortable operations. On the other hand, from the experimental results of our model wheelchairs, it was confirmed that a wheelchair, whose rotating angles of the both wheels are controlled to the same angle, has high performance of straight running. Therefore, it is expected that the following assistance device is useful for the safty and comfortable operations.
Assistance Device with LSD
After above discussions, we designed and built a new assistance device with LSD. The following figure shows its structure. In this mechanism, the axles of the both wheels are locked at smaller difference of the torques such as the inertia driving condition. When the wheels have bigger difference of the tortues such as a intentional turning, the both wheels can rotate independently as the same of a general wheelchair.
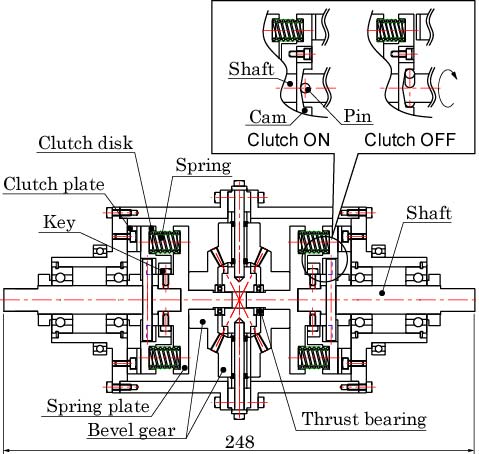
Structure of the Assistance Device
 Structure and Principle Structure and Principle
This mechanism consists of four bevel gears, two shafts, plural springs, spring plates, clutch disks and clutch plates fixed to a outer case. As a key is located between the clutch disk and the spring plate, they do not have a rotating motion. Also the shaft and the splring plate have a free connection, and they have a rotating motion.
In the case of the smaller difference of torques between the shafts, the clutch disk touchs to the clutch plate stringly by the springs. Then the axles are locked.
In the case of the bigger difference of torques between the shafts, the pin, which is located into the shaft, pushes the taper cam, and the clutch disk does not touchs to the clutch plate. And the both axles can rotate independently.
|
A Wheelchair with the Assistance Device
Conclusion
We constructed the assistance device to a wheelchare, and tried to confirm its operation. As the results, it was confirmed that the assistance device is effective for the wheelchair operations on the slope and the waving surface. However, the clutch was not so suitable work. We are improving and adjusting the equipment (October 2002).
More Information
CAD data of the assistance device (Underconstructing...)
|

