|

差動制限機構を利用した車いす走行補助装置
2002年10月 平田宏一,高田康夫
|
|
 研究テーマの概要
研究テーマの概要 |
|
動揺している船舶において手動車いすを運転する場合,その操作は著しく難しくなり,暴走・転倒といった危険性が高まります。このページでは,動揺条件下での手動車いすの移動を安全かつ快適にすることを目的として,手動車いすの左右後輪の間に差動制限機構(LSD,Limited Slip Differential Gear)を取り付けた走行補助装置を提案します。 |
|
|
手動車いすの走行特性と走行補助装置 |
手動車いすはその構造上,左右方向に傾斜した路面に置かれると,重力の影響を受けて谷側へと旋回する力が働きます。右図は水平面および波状走行面におけるトルクの測定結果です。これより,水平面では左右の後輪にほぼ同一なトルク変化を与えて走行しているのに対し,波状走行面では,傾斜部に差しかかると,谷側後輪に強い駆動トルクを与え,山側後輪に断続的なブレーキトルクを与えていることがわかります。手動車いすが傾斜面や動揺面を走行する場合,このような複雑な操作が車いすの操作を著しく困難にしていると考えられます。
|
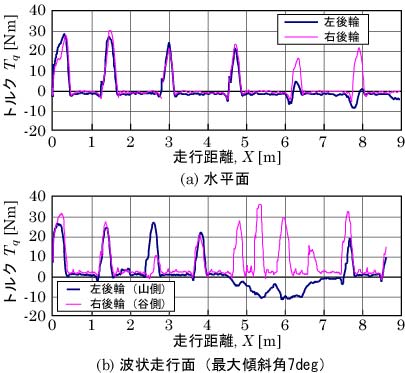
手動車いすの走行特性
|
右図は,波状走行面の傾斜部における走行距離とトルク並びに旋回角速度(山側への旋回を正)の測定結果です。これより,旋回角速度は,駆動走行の状態で上向き,慣性走行の状態で下向きとなっていることがわかります。これは,慣性走行の状態において車いすは重力の影響を受けて谷側に旋回し,駆動走行の状態において山側への方向修正の操作をしていることを示しています。
|
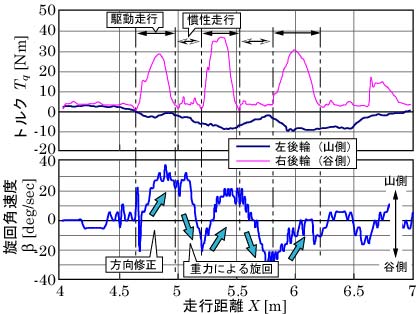
波状走行面におけるトルクと旋回角速度
|
以上より,慣性走行時の重力による旋回を少なくすることで,手動車いすの走行を安全かつ快適にできると考えられます。また,模型車いすの実験結果より,車いすの後輪のスリップは極めて小さいため,左右後輪の車軸が同一の回転速度で運動する車いすは重力の影響を受けにくいことが確認されています。すなわち,左右後輪の車軸を連結して,同一の回転速度とすることで,重力による旋回運動を少なくできると考えられます。もちろん,手動車いすを故意に旋回させる場合には,左右後輪に回転角度差が必要になります。
|
|
|
差動制限機構を用いた車いす走行補助装置 |
| 以上の検討を行った後,新しい走行補助装置の設計・試作を行いました。下図に示す走行補助装置は,左右後輪のトルク差が小さい場合(慣性走行),左右後輪の車軸を連結することで重力による旋回運動を少なくし,トルク差が大きい場合(故意の旋回時)には通常の手動車いすと同様,左右後輪が独立して回転できます。 |
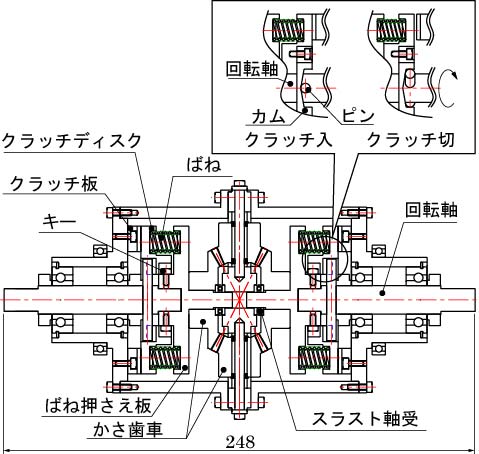
走行補助装置の構造 |
 構造と原理 構造と原理
この差動制限機構は,4個のかさ歯車,左右後輪につながる2本の回転軸,複数のばね,かさ歯車に固定したばね押さえ板,クラッチディスク,ケーシングに固定したクラッチ板等から構成されています。ばね押さえ板とクラッチディスクとは,キーにより軸方向だけに運動できます。また,ばね押さえ板と回転軸とは回転方向にフリーになっています。
2本の回転軸に与えられるトルク差が小さい場合,クラッチディスクはばねによりクラッチ板に押し付けられているため,左右後輪の車軸は機械的に締結された状態となります。
トルク差が大きい場合,回転軸に取り付けたピンが,クラッチディスクに取り付けたカムのテーパ面を押し,クラッチディスクがクラッチ板から離れ,車軸の締結が解除されます。
|

走行補助装置の外観
|

走行補助装置を取り付けた車いす
|
|
|
|
まとめ
|
| 試作した走行補助装置を手動車いすに取り付けて動作確認を行いました。その結果,慣性走行時の重力による旋回が少なくなり,傾斜面や波状走行面において操作感が向上することが確認できました。しかし,現状では,故意に旋回する際のクラッチの解除が適切に機能していません。現在,装置の改良や調整を進めています(2002年10月)。 |
|
| [ Barrier-free HOME ]
[ NMRI HOME ]
|
| このページに関するお問い合わせはkhirata@nmri.go.jpまでお願いします
|
|