| Test Driving Report of an Electric Wheelchair on a Simple Experimental Slope Koichi Hirata, February, 2002 
 We borrowed an electric wheelchair (Aisin Seiki Co. Ltd.), and drived on the simple experimental slope to image a waving ship which was developed by us. Length of the imaging slope is about 11 m. It had 5 deg of slope angle at a middle position to image the waving ship.
We borrowed an electric wheelchair (Aisin Seiki Co. Ltd.), and drived on the simple experimental slope to image a waving ship which was developed by us. Length of the imaging slope is about 11 m. It had 5 deg of slope angle at a middle position to image the waving ship.A below photograph shows the driving line. After we drived on the imaging slope many times, we made sure the driving characteristics of the electric wheelchair as follows. Though the characteristics were affected by operations.
(1) In the first half of the slope, the wheelchair can keep a straight line easily. 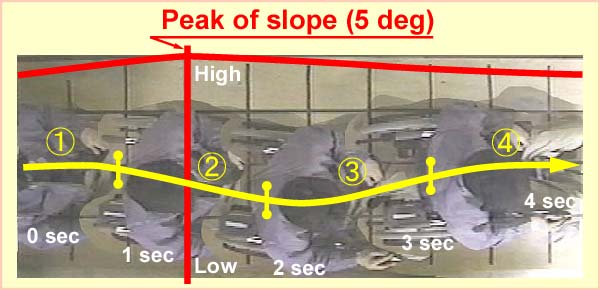
Therefore, if the driver keeps the sense of equilibrium on a ship, there is no slip between the tires and a road surface, and the driver keeps suitable operation, it is considered that the electric wheelchair can be operated easily on a waving ship. |
|
[ Barrier-free HOME ] [ NMRI HOME ] |
|
|
| Contact: khirata@nmri.go.jp |