 簡易動揺イメージ台における電動車いす試乗レポート 2002年2月 平田宏一 |
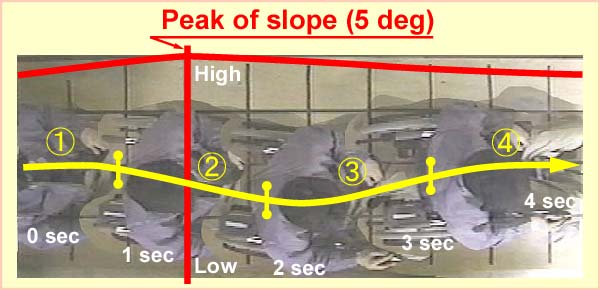
 電動車いす(アイシン精機製)をレンタルして,別途製作した簡易動揺イメージ台の上を走行しました。イメージ台の全長は約11 mで,その中間に5 degの傾斜をつけて,船舶の揺れをイメージしました。 電動車いす(アイシン精機製)をレンタルして,別途製作した簡易動揺イメージ台の上を走行しました。イメージ台の全長は約11 mで,その中間に5 degの傾斜をつけて,船舶の揺れをイメージしました。下の写真は,走行時の連続写真です。もちろん,操作者の操作方法による影響が大きいのですが,何度か走行してみたところ,電動車いすには次のような走行特性があることがわかりました。 ①傾斜の前半部分では,比較的簡単に直進走行を保つことができる。 ②ジョイスティックを直進に保っていると,傾斜の頂上付近からわずかに下方向(右)に落下する。 ③ジョイスティックを上方向(左)に操作し,軌道を修正する。 ④再び直進走行を行う。 |
 |
| 車いすをレンタルしていたため,詳細な操作方法や車いすの走行軌跡,車輪のトルクなどを測定することはできませんでした。しかし,このような動揺条件下であっても,電動車いすは急激な落下がなく,手動車いすと比べて操作が簡単であることが実感できました。すなわち,操作者の平衡感覚が保たれ,タイヤと路面とのスリップがなく,しかも誤操作をしないと仮定すれば,動揺する船舶上で電動車いすを走行することはそれほど難しくないと考えられます。 |
| [ Barrier-free HOME ] [ NMRI HOME ] |
| このページに関するお問い合わせはkhirata@nmri.go.jpまでお願いします |
