|
傾斜装置を用いた車いす走行実験(2001年6月実施)
横断走行時の測定結果と旋回特性についての詳細な議論
H: おはようございます。
M: おはようございます。
H: 今,実験データの修正・見直しが終わりました。
M: ありがとうございます。
H: 修正したのは,エンコーダ信号の不具合です。具体的に言うと,エンコーダの2進法の信号が飛んでしまうと,車輪角度,速度,出力に大きく影響します。周りのデータから推測して修正しています。推測はほぼ間違いないと思いますので,データの偽造ではありません。
H: 測定プログラムでは,3周期分のデータを処理します。しかし,傾斜角が小さいときは,車いすが加速状態になっていることと,トルク変動が小さいことから,周期の判別が難しくなります。明らかにおかしいと思われるデータは削除してあります。
H: また,傾斜角が小さいときは,被験者の操作が不安定になっています。そのため,データがばらつくかもしれません。つまり,加速状態ということなのですが,そのリズムが一定でないということです。
M: メモありがとうございます。実際に描いてみて、参照します。
(10分後)
H: 今,こちらでもグラフを書いてみました。
M: はい。
H: 縦断走行のデータはよくとれているようです。
M: なるほど。
H: 横断走行のデータも,傾向はよく出ていますが,考察は難しそうです。
M: がんばります。
H: 旋回角度,旋回角速度が何を表しているのか,どのような現象なのか,説明する必要がありそうです。
M: 旋回角速度ですが、時間はどう考えるのでしょうか。
H: と言いますと?
M: その旋回角度を生じている(形成している)時間で割っているのでしたでしょうか?
H: プログラム上の計算は,旋回角度の差をサンプリング周期で割っています。データファイルでは,その最大値と最小値が載せてあります。
M: あっ、わかりました。
H: 測定プログラムの下段の右から2番目のグラフが旋回角速度です。これと操作(トルク変動)の関係を見る必要があるかもしれません。
M: はい。
H: ちょっと,こちらでも見てみます。
M: すみません。ありがとうございます。
(10分後,右の図を見ながら)
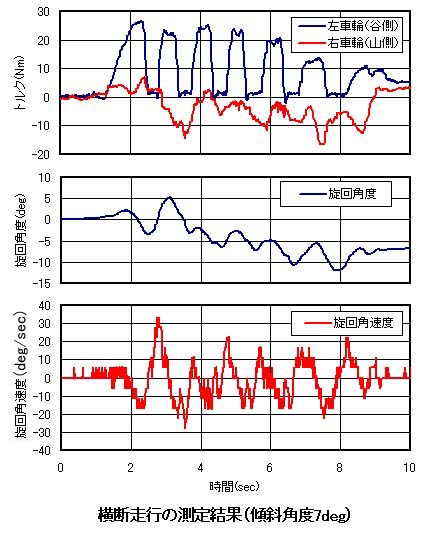
H: この図は傾斜角度7degで右から左に横断走行した際の結果です。
M: はい。
H: 旋回角度と旋回角速度は,車いす左向きが正です。
M: はい。
H: 落下方向がグラフ上向き,登り方向がグラフ下向きになります。
M: はい。
H: 今までがグラフの説明です。これからが考察の前段階です。
M: はい。
H: トルク変動と旋回角度の関係を見ます。
M: はい。
H: 旋回角度のグラフが上向き(落下方向)になるのは,トルクが正になり始めるときのようです。
H: つまり,こぎ初めてから,方向修正をしているように見えます。
M: えーっと、
H: トルクが0から正になるとき(駆動を始めるとき),旋回角度は落下方向(上向き)になっているのがわかりますか?
M: はい、わかります。
H: 2周期目は特にわかりやすいと思います。
M: そうですね。そのあともそうなってますね。
H: はい。次にトルクと旋回角速度の関係を見ます。
M: はい。
H: グラフを強引に読みとると,トルクが0のときに落下しています。
M: 旋回角速度の方も、そのように読みとれます。
H: つまり,旋回角度よりも旋回角速度の方が,動きが早いこと(位相が早い)がわかるかと思います。
H: ここから,うまく説明できないのですが(考えがまとまっていないのですが),
H: 最大旋回角速度は,落下時間の長さと角速度の傾きで決まります。
M: はい、わかります。
H: 最終的に,最大旋回角速度は暴走の危険性を表せるのではないか,と結びつけたいです。
M: えーっと、
H: ここの説明は難しいです。私ももう少し考えないとなりません。
M: はい。私も考えます。
H: 最大旋回角速度が,車いす走行の最も不安定なトルク=0のときの状態を強く表している,ということでしょうか。
M: トルク0が不安定というのは、わかります。
H: 最大旋回角速度は,不安定な時間が長いほど大きくなります。
M: 駆動トルクがかかっていないので、落ちるのを止める力が作用しないということでしょうか。
H: そう言うことになります。制御不能状態と言うか,すでに暴走状態になっているというか。
M: はい。それは理解できます。「最大旋回角速度は,落下時間の長さと角速度の傾きで決まる」のことですが、
M: 「角速度の傾き」は、旋回角速度のグラフの傾きということでよかったでしょうか。
H: そうです。
H: 確かめていませんが,「角速度の傾き」は傾斜角度で決まるはずです。
M: すみません。戻りますが。最大旋回角速度は、グラフのピークの一番大きい値ではないのですか?
H: そうです。
H: 時間が同じで,傾きが大きければピーク値は大きくなります。
H: 傾きが同じで,時間が長ければピーク値は大きくなります。
M: 「時間が同じで,傾きが大きければ」という現象は、旋回角度差が大きいということでしょうか。
H: 結果的にそうなると思います。
M: 結果的にというのは、旋回角速度の算出が、サンプリング周期でおこなわれているからですね。
H: いえ。あまり細かくは考えていませんが,旋回角度差は初期条件によって変わると思います。
M: 最初に向いている向きとかですね。
H: そうです。私が言いたいのは,あまり詳細なことではなくて,旋回角速度のグラフや最大旋回角速度の値が力学的な意味を持っているということです。
H: 「力学的な意味」とは,今までに議論したような危険性・車いすの走行特性のことです。
M: 言い換えてくださって、助かりました。
H: さらに,最大旋回角速度が大きいということ(落下方向)は,登り方向の操作も同じように大きくする必要があります。
M: はい。
H: つまり,進行方向を保つためには,早く方向修正をする必要があり,操作は難しくなるはずです。
M: はい。
H: ゆっくりと方向修正するのと,早く方向修正するのとの違いです。
M: はい、わかります。
H: 少し私の間違いがあるかもしれませんが,
M: はい。
H: 角速度を修正するのにはパワーが必要です。
H: 平坦な路面で,旋回角度を変えるだけであれば,パワーはほとんど必要ありません。その違いはわかりますか?
M: 速度に対してと傾斜に対してと両方だからでしょうか?
H: いえ。動的な回転運動だからです。これについてはもう少し考えないと説明できません。
H: この辺りの力学は後ほど説明します。
H: ようするに,
H: 以上のことから,純粋な力学的な意味と人間の操作との両面から考えて,最大旋回角速度は危険性を表す指標になるのではないか,と結びつけられないか,言いたいのですが。
M: はい。
H: 何となくおわかり頂けたでしょうか?
M: はい。ただ、旋回角度と旋回角速度をちゃんと整理しないと。
H: 旋回角度には時間の項が入っていません。
M: はい。
H: 仮に,最大旋回角度(ピーク値)をとったとしても,これは車いすの位置を表していて,運動を表していません。
M: はい。
H: 傾斜ということを考えない場合,最大旋回角度が5degというのは危険ではありません。
M: はい。
H: しかし,傾斜を考えない場合でも,最大旋回角速度が大きい際には,放っておくと車いすはどんどん動いてしまうのです。
M: はい、わかりました。
H: 今のは概念的な話です。実質的には旋回角度やぶれでも評価可能だと思います。
M: それは、結果からということになりますか?
H: 何とも言えませんが,800mm幅の廊下を走るとか,具体的な走行パターンが決まっている場合です。
M: はい。
H: こんなところをうまくまとめられますか?
M: はい、整理してみます。
|