傾斜装置を用いた車いす走行実験(2001年6月20日実施) 
|
||||
| ●はじめに | ||||
 傾斜装置の角度を0度から7度の間で変化させ,普段から車いすを使用している20代女性の被験者に縦断走行(登坂走行)と横断走行をしていただきました。被験者には計測用車いすに載っていただき,詳細なデータを測定しました。ここでは測定結果の一部を紹介します。 傾斜装置の角度を0度から7度の間で変化させ,普段から車いすを使用している20代女性の被験者に縦断走行(登坂走行)と横断走行をしていただきました。被験者には計測用車いすに載っていただき,詳細なデータを測定しました。ここでは測定結果の一部を紹介します。
|
||||
| ●縦断走行時の車いす操作と速度 | ||||
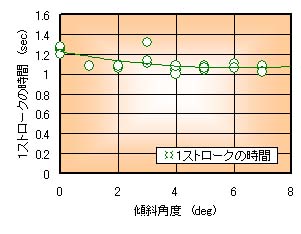
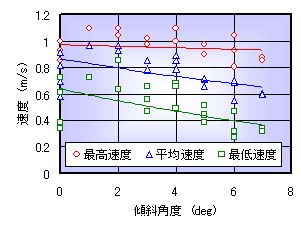
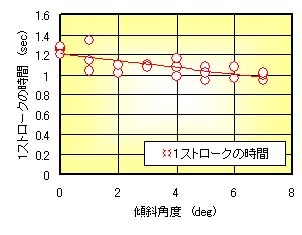
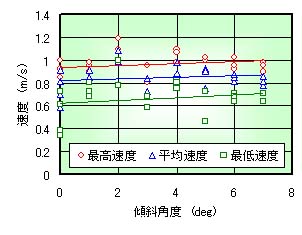
 図1は,縦断走行(登坂走行)時の1ストロークの時間(1回こぐ間の時間)を示しています。これより,傾斜角度が変化しても,1ストロークの時間はあまり変化していないことがわかります。これは,被験者が常に一定のリズムで車いすの操作をしていることを表しています。 図1は,縦断走行(登坂走行)時の1ストロークの時間(1回こぐ間の時間)を示しています。これより,傾斜角度が変化しても,1ストロークの時間はあまり変化していないことがわかります。これは,被験者が常に一定のリズムで車いすの操作をしていることを表しています。図2は,縦断走行における最高速度,平均速度,最低速度の測定結果を示しています。車いすは,駆動力(トルク)を与えている間に加速し,手をハンドリムから離している間(トルクが0のとき)に減速します。すなわち,速度は1ストローク中に大きく変動しています。図2より,最高速度は傾斜角度が変化してもそれほど変化していないことがわかりますが,平均速度と最低速度は傾斜角度が大きくなるに従って遅くなっていることがわかります。最高速度があまり変化していないということは,操作のリズムがかなり安定していることを表しています。傾斜角度が大きくなると,平均速度と最低速度が遅くなるのは,手をハンドリムから離している間に,重力の影響を受けて,急激に減速しているためです。
|
||||
| ●縦断走行時のトルクと仕事率 | ||||
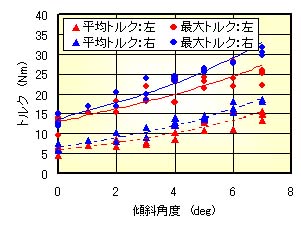
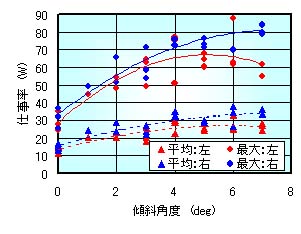
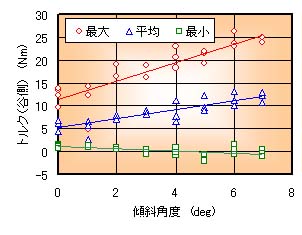
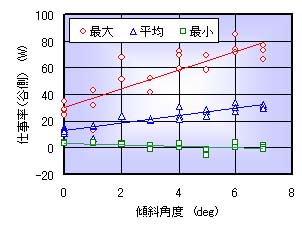
| 車いすはハンドリムに駆動力を与えて進んでいます。トルクは,駆動力にハンドリムの半径を掛けた値になります。ハンドリムの半径は一定なので,トルクは「駆動力の大きさ」を表しています。そして,車いすの駆動力は断続に与えられるため,トルクは大きく変動します。 図3は,縦断走行における最大トルクと平均トルクの測定結果を示しています。これより,トルクは,傾斜角度が大きくなるに従って,直線的に大きくなっていることがわかります。すなわち,傾斜角度が大きいほど,大きい力を加えていることを表しています。 仕事率はW(ワット)の単位で表されます。これは,1秒当たりに行われた仕事の量を表しています。車いすに力を与えて,速く動かすほど仕事率が大きくなります。大きい力を与えたとしても,動きが遅くなった場合,仕事率は大きくなりません。つまり,仕事率には,力と動きの大きさだけでなく,その速さが大きく関係しています。 図4は最大仕事率と平均仕事率の測定結果を示しています。図3と図4を比べてみると,傾斜角度を大きくした場合,図3のトルクは直線的に大きくなっているのに対し,図4の仕事率はゆるやかに大きくなっていることがわかります。つまり,傾斜角度が大きい場合,力(トルク)は大きくなるものの,動きが遅くなるため,仕事率は頭打ちする傾向にあります。  縦断走行についての詳細な議論
縦断走行についての詳細な議論
|
||||
| ●横断走行時の車いす操作と速度 | ||||
 図5は,横断走行における1ストロークの時間(1回こぐ間の時間)を示しています。これより,傾斜角度が大きくなると,1ストロークの時間はわずかに短くなっていることがわかります。車いすが傾斜のある路面を横断走行する場合,前輪・後輪の構造と重心位置の関係によって,谷側(落下する方向)に旋回する力が働きます。そのため,傾斜角度が大きくなると,方向修正のための時間が長くなっていると考えられます。しかし,1ストロークの時間の変化は少なく,被験者は常に安定したリズムで車いすの操作をしていると言えます。 図5は,横断走行における1ストロークの時間(1回こぐ間の時間)を示しています。これより,傾斜角度が大きくなると,1ストロークの時間はわずかに短くなっていることがわかります。車いすが傾斜のある路面を横断走行する場合,前輪・後輪の構造と重心位置の関係によって,谷側(落下する方向)に旋回する力が働きます。そのため,傾斜角度が大きくなると,方向修正のための時間が長くなっていると考えられます。しかし,1ストロークの時間の変化は少なく,被験者は常に安定したリズムで車いすの操作をしていると言えます。図6は,横断走行における最高速度,平均速度,最低速度の測定結果を示しています。これより,最高速度,平均速度,最低速度は傾斜角度が変化してもほとんど変化していないことがわかります。このことからも,被験者は常に安定したリズムで車いすの操作をしていることがわかります。
|
||||
| ●横断走行時のトルクと仕事率 | ||||
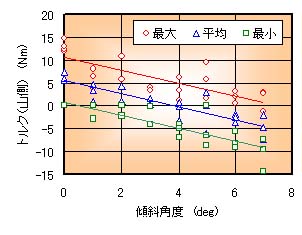
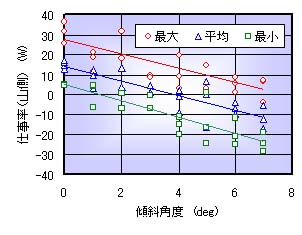
| 図7は,横断走行(左下がり斜面)における谷側車輪(左車輪)の最大トルク,平均トルク,最小トルクの測定結果を示しています。図8は,山側車輪(右車輪)の最大トルク,平均トルク,最小トルクの測定結果を示しています。これより,横断走行における谷側車輪のトルクは,縦断走行と同様,直線的に変化していることがわかります。一方,山側車輪のトルクは,傾斜角度が大きくなるに従って,小さくなっています。そして,平均トルクは傾斜角度が約4度を越えると負の値になっています。これは山側車輪にブレーキをかけていることを表しています。 図9と図10は,それぞれ谷側車輪(左車輪)と山側車輪(右車輪)の最大仕事率,平均仕事率,最小仕事率の測定結果を示しています。トルクと仕事率を比べてみると,これらの傾向はあまり変わらないことがわかります。これは,傾斜角度が変化しても,動きの速さがあまり変化していないためであると考えられます。
|
||||
| ●横断走行中の旋回特性 | ||||
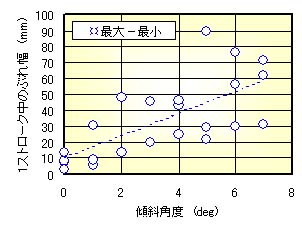
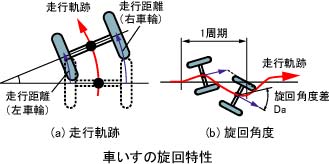 図11〜14は,横断走行(左下がり斜面)における測定結果です。図11に示す旋回角度とは,1ストローク中に車いすが最も左(下)を向いた際の角度(最大旋回角度)と最も右(上)を向いた際の角度(最小旋回角度)を表しています。なお,測定開始時の車いすの角度が0度です。測定結果はかなりばらついていますが,これは旋回角度の変化が小さいことや測定開始時の車いすの位置の影響が大きいことが原因であると考えられます。
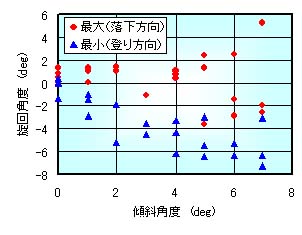
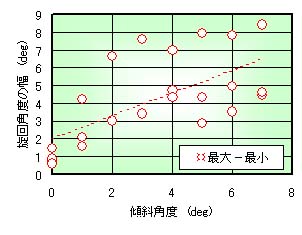
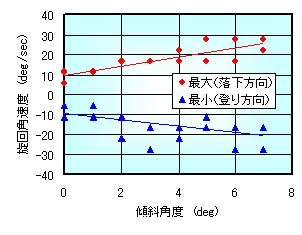
図11〜14は,横断走行(左下がり斜面)における測定結果です。図11に示す旋回角度とは,1ストローク中に車いすが最も左(下)を向いた際の角度(最大旋回角度)と最も右(上)を向いた際の角度(最小旋回角度)を表しています。なお,測定開始時の車いすの角度が0度です。測定結果はかなりばらついていますが,これは旋回角度の変化が小さいことや測定開始時の車いすの位置の影響が大きいことが原因であると考えられます。図12は,最大旋回角度と最小旋回角度との差を表しています。これは,走行時の蛇行の程度(1ストローク中にどの程度の向きを変えているのか)を表しており,ばらつきは大きいものの,傾斜角度が大きくなるに従って大きくなっていると見受けられます。 図13は,横断走行時の横方向のぶれを表しています。これも,走行時の蛇行の程度(1ストローク中,横方向にどの程度の移動をしているのか)を表しており,ばらつきは大きいものの,傾斜角度が大きくなるに従って大きくなる傾向になると見受けられます。 図14は,横断走行時の最大旋回角速度(落下方向)と最小旋回角速度(登り方向)を示しています。旋回角速度は1秒当たりの旋回角度であり,最大旋回角速度は落下の激しさ,最小旋回角速度は方向修正の慌ただしさを表しています。すなわち,この測定結果は,傾斜角度が大きくなると,落下が激しくなり,操作が慌ただしくなっていると言えます。
横断走行時の測定結果と旋回特性についての詳細な議論
もっと詳細な横断走行についての議論
|
||||
| ●まとめ | ||||
|
以上,傾斜装置を用いた車いす走行の測定結果を紹介しました。これらの結果を,動揺している船舶で車いすを操作する際の安全性や快適性を評価するための基礎データとして活用したいと考えています。しかし,車いすは人間が操作するため,その操作能力や操作方法によって走行特性は大きく変わりますので,安全性や快適性の評価は簡単なことではありません。今後,さらなる詳細な研究が必要であると考えています。 以上の測定データは,普段から車いすを使用している被験者のデータであり,かなり安定したリズムで操作しています。そのため,測定データの「質」はかなり高く,今後の研究にとても有用なデータであると確信しています。 最後に,本実験に多大な協力をいただいた小川奈奈さんに心から感謝いたします。 |
||||
| [ Barrier-free HOME ] [ NMRI HOME ] | ||||
| このページに関するお問い合わせはokuzumi@nmri.go.jp, khirata@nmri.go.jp, imasato@nmri.go.jpまでお願いします | ||||