模型車いす用動揺台の製作 模型車いす用動揺台の製作2001年6月 平田宏一,榊原寛明,牧田安弘 |
|||
 はじめに
はじめに 動揺している船の上で,車いすの実験をするのはとても大変です。また,実際の車いすを使って動揺条件下での走行実験をするためには,非常に大きい動揺台を製作する必要があります。そこで,縮尺1/3〜1/5程度の車いす模型を想定した小型動揺台を製作しました。 動揺している船の上で,車いすの実験をするのはとても大変です。また,実際の車いすを使って動揺条件下での走行実験をするためには,非常に大きい動揺台を製作する必要があります。そこで,縮尺1/3〜1/5程度の車いす模型を想定した小型動揺台を製作しました。 |
|||
|
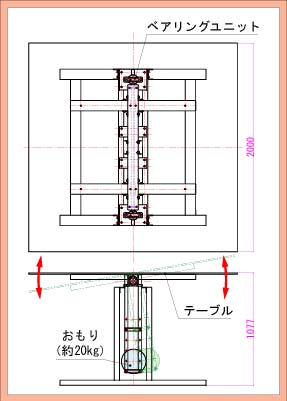
模型車いす用動揺台の構造 |
|||
|
|||
試験結果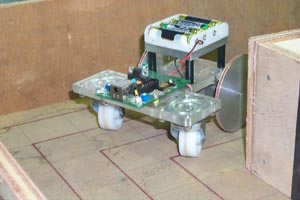 テーブルの上に通路幅約300mmのフェンスを取り付け,以前に製作した模型車いすを走行させてみました。ここで使用した模型車いす(右写真)は,市販の入門用ロボット「梵天丸(ぼんてんまる)」の電子基板をそのまま使用し,電動車いすをイメージした前輪と後輪を取り付けたものです。電子基板には赤外線センサが取り付けられていて,フェンス(障害物)に当たらないように旋回制御を行います。 テーブルの上に通路幅約300mmのフェンスを取り付け,以前に製作した模型車いすを走行させてみました。ここで使用した模型車いす(右写真)は,市販の入門用ロボット「梵天丸(ぼんてんまる)」の電子基板をそのまま使用し,電動車いすをイメージした前輪と後輪を取り付けたものです。電子基板には赤外線センサが取り付けられていて,フェンス(障害物)に当たらないように旋回制御を行います。動揺台を揺らしたとき(最大振幅約10度,周期約2秒)と止めたときとでは,模型車いすの走行軌跡にそれほど大きな違いは見られませんでした。これは,「梵天丸」の制御がとてもよく,後輪と床面とのスリップがかなり少ないため,通路を適切に走行したためであると考えられます。しかし,動揺台を揺らしたときの赤外線センサによる制御回数は,動揺台を止めているときの制御回数よりもかなり多く,実際の車いすを動揺条件下で操作することはかなり困難になることが予想されます。今後,新たな実験用模型車いすを製作し,詳細な実験を進めていきます。 なお,今回使用した模型車いすはモータが停止することによってブレーキがかかるため,動揺条件下でも比較的安定した走行になります。しかし,駆動力に変動があり,しかも慣性を利用して走行する手動車いすでは,床面の揺れが走行特性に与える影響はかなり大きくなると考えられます。 |
|||
|
付録
|
|||
| [ Barrier-free HOME ] [ NMRI HOME ] | |||
| このページに関するお問い合わせはkhirata@nmri.go.jpまでお願いします | |||