|
|
|
Stirling engine for a fish robot, S-FPSE 2000 By Koichi Hirata, last updated April 2001. 
In order to investigate the engine performance and any problems for adaptability of a Semi-free-piston Stirling engine for a fish robot, a model boat with the fish-like swimming mechanism was developed.


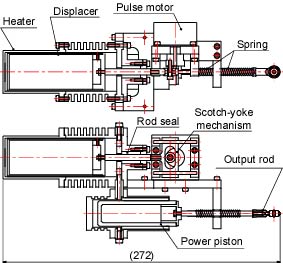
 Structure of the Engine Structure of the Engine
The figure to the right shows the structure of the prototype engine. The basic structure of the engine is the same of the first prototype engine. It has a simple heater and a displacer piston, and does not have a regenerator. A pulse motor is used to drive the displacer piston, because it can set the frequency easily. The frequency of the pulse motor is controlled from 0.5 to 4.0 Hz with 0.5 Hz steps by a microcomputer. A Scotch-yoke mechanism is adopted as the drive mechanism for the displacer piston. A slide bearing, which is made of PTFE, is used as a rod seal of the displacer piston. A glass syringe is used as the power piston and cylinder. Two mechanical springs attach to a rod of the power piston. 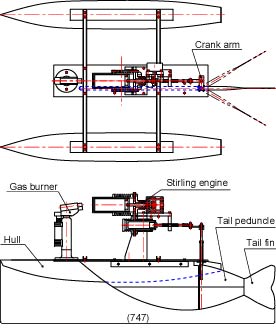 Structure of the Model Boat
Structure of the Model Boat
The figure to the right shows the structure of the model boat. A twin-hull type boat is adopted with considerations of stability. The prototype engine is located on the central position of the boat. A small gas burner is located at the front of the engine, and heats the heater head directly. The fish-like swimming mechanism is located at the rear end of the boat. The mechanism is attached from the rod of the power piston through a crank mechanism. A tail peduncle is made of a hard wood, and the tail fin is made of a soft plastic plate, which has 0.75 mm of thickness. The total weight, including the engine, is about 2 kg.
 Performance of the S-FPSE 2000
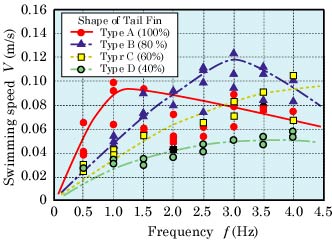
Performance of the S-FPSE 2000Four different sized tail fins are used in the following experiments. They have similar figures. Type B, Type C and Type D have 80 %, 60 % and 40 % of projected area of Type A respectively.
The figure to the right shows experimental results of the first trial of the relation between the frequency and the speed of the boat. In the experiment, top speed reaches about 0.12 m/s at 3 Hz of frequency using Type B tail fin. From the considerations of the size of boat and tail fin, I think that the speed is not enough high. If the spring constant and the size of the tail fin are adjusted suitably, it is expected that the boat can get higher speed. Also, it is considered that the experimental results have no good accuracy, because the model boat was affected disturbance such as a wind, and could not keep a straight course suitably.
Development Dialy of the S-FPSE 2000 [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
|
|
| Contact khirata@nmri.go.jp |