| Prototype Fish Robot, PF-200 K. Hirata and D. Aoki, January 24, 2003 
 Up-Down Motion of Small Fish Robot
Up-Down Motion of Small Fish Robot
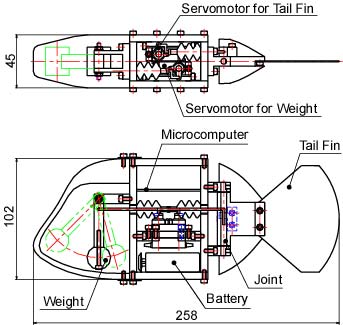
In order to investigate the up-down motion of a small fish robot, we designed and built the Prototype Fish Robot, PF-200. We discussed about various the up-down motion mechanisms. As the result, the PF-200 was adopted 'movement of weight' mechanism. The mechanism brings inclinations of the fish robot, and it has the up-down motion with the thrust force of a tail fin.
Structure of the PF-200
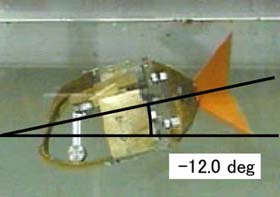
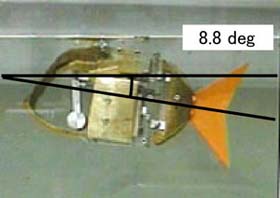
Inclination of Stationary Situation
The follows figures shows the inclinations of stationary situation with the movement of the weight. The inclinated angle of the fish robot is affected by the movement of the weight and the height between the center of gravity and the floating point.
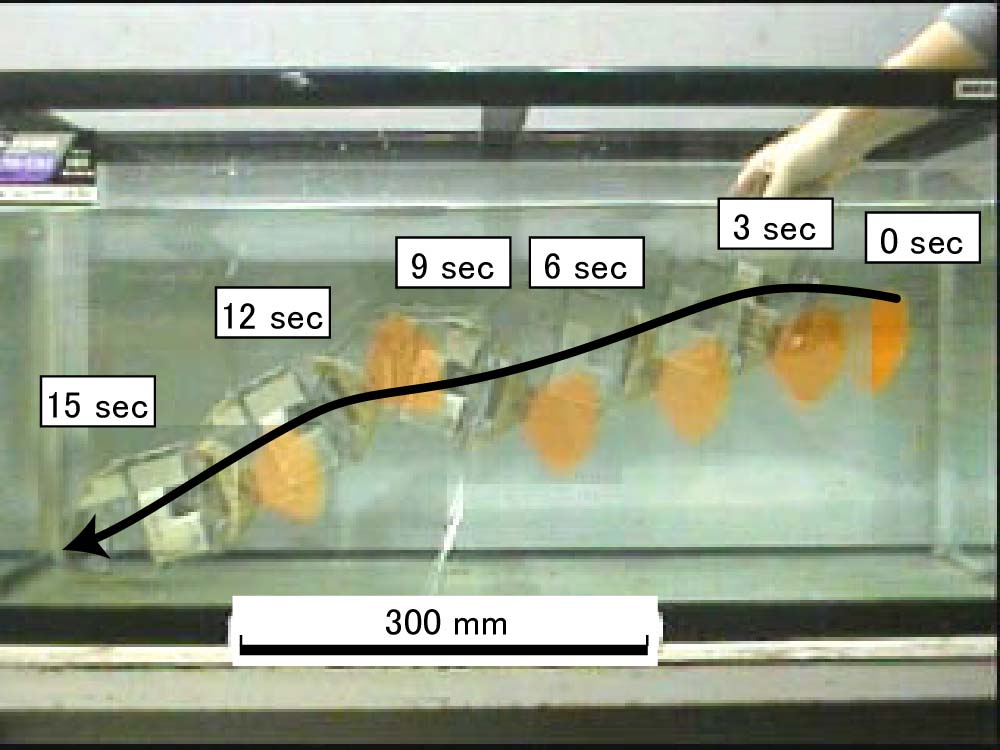
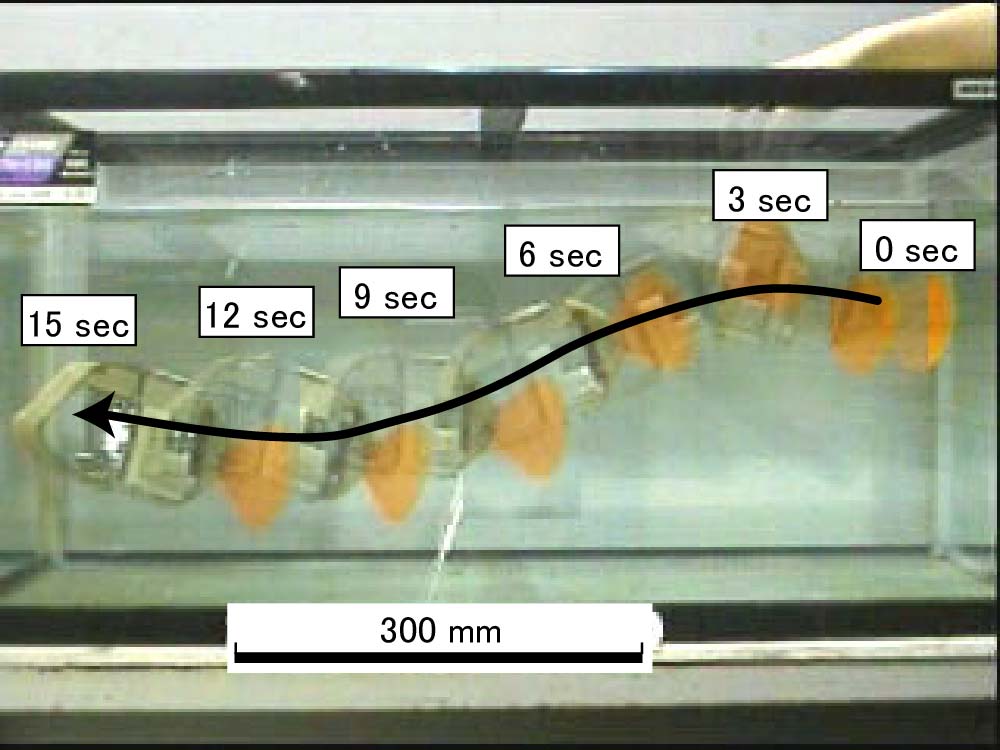
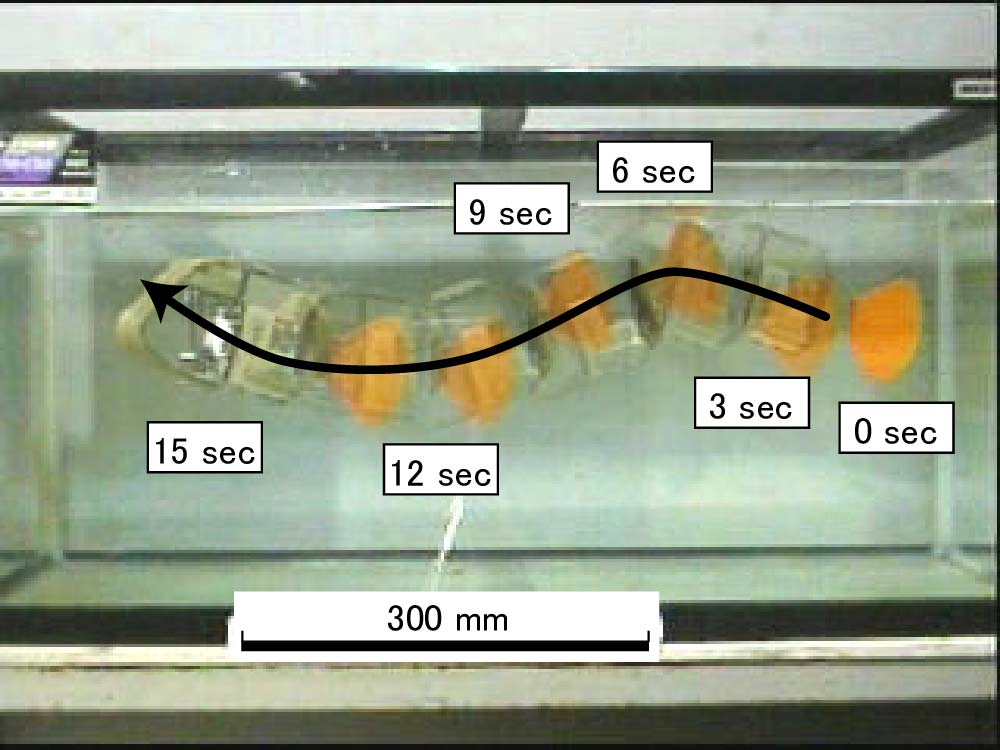
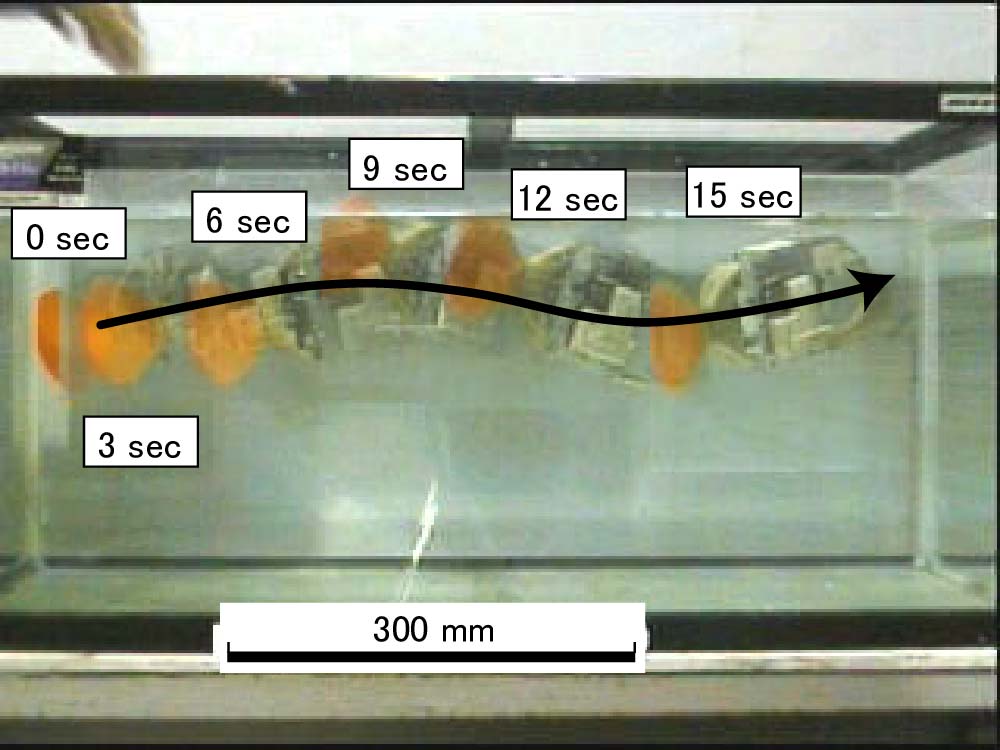
Up-Down Motion of the PF-200
To get the up-down motion of the PF-200 suitably, we must adjust the floating force carefully. The follows figures shows the experimental results with thin balsa floats (40x10x2 mm) for the adjustment. The PF-200 has 543.4 gf of weight on air. The adjustment of a balsa is only 0.6 gf. The PF-200 swims with up-down motion after the adjustment.
(Click figure and view a big figure)   CAD Data of the PF-200 (Underconstructing...)Microcomputer and Program of the PF-200 (Underconstructing...) CAD Data of the PF-200 (Underconstructing...)Microcomputer and Program of the PF-200 (Underconstructing...)[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] | ||||||||
| Contact khirata@nmri.go.jp |