| 実験用魚ロボット「PF-200」 2003/1/24更新 平田宏一,青木大輔 
 小型魚ロボットの上下運動
小型魚ロボットの上下運動
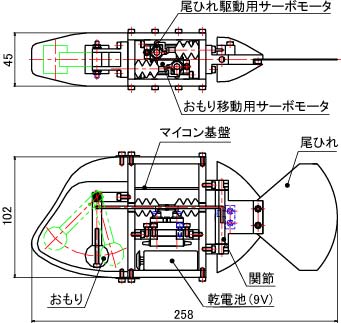
主として,小型魚ロボットの上下運動を調べるため,実験用魚ロボットPF-200を設計・試作しました。様々な上下運動の方法を検討した結果,おもりを前後に運動させることで,魚ロボットを傾斜させ,尾ひれの振動による推進力で上下運動を行うこととしました。
実験用魚ロボット「PF-200」の構造
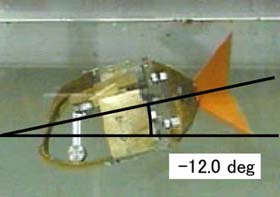
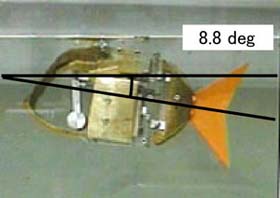
静止状態での魚ロボットの傾斜
下の写真は,おもりを前後に動かした場合の魚ロボットの傾斜を表しています。魚ロボットの傾斜角度は,おもりの移動量や「浮心と重心との距離(高さ)」に大きく影響を受けます。
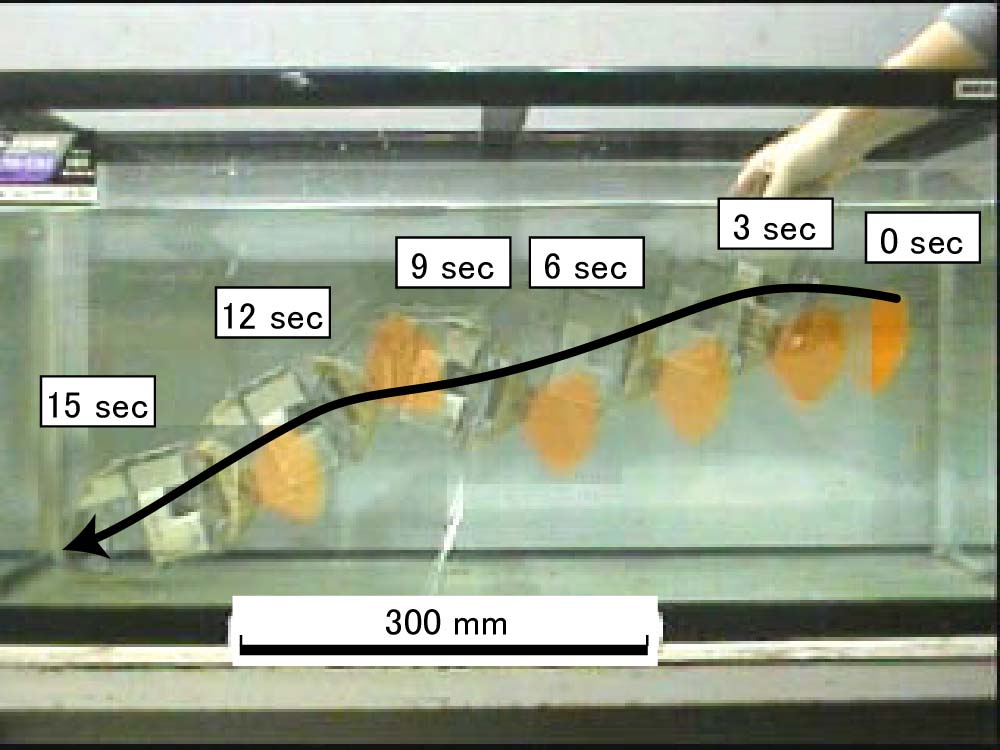
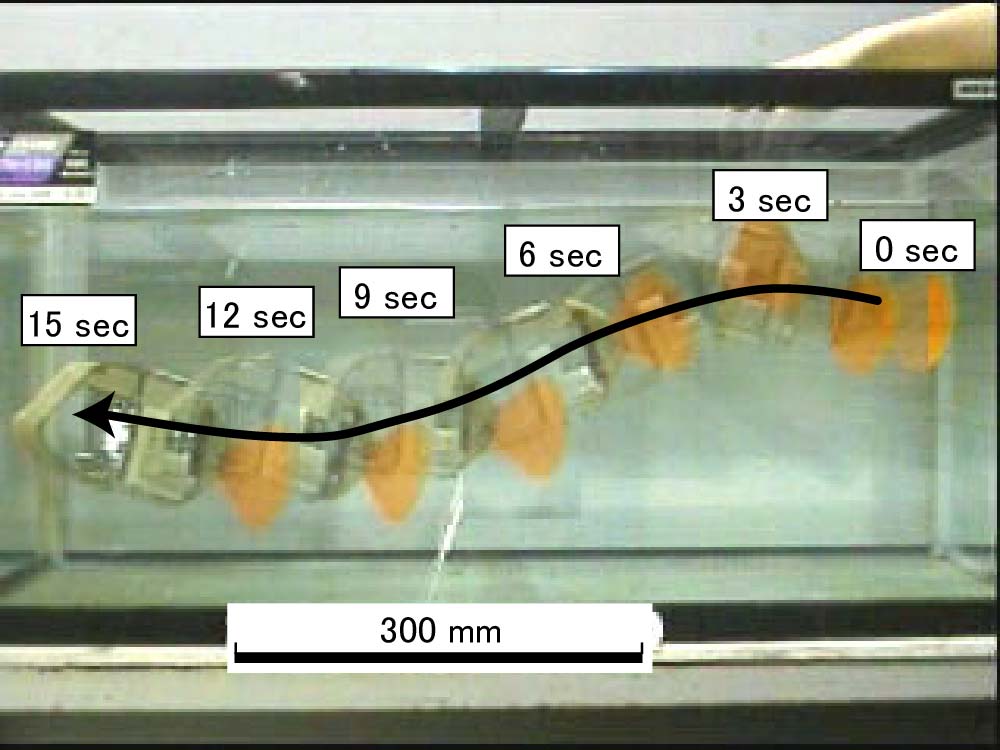
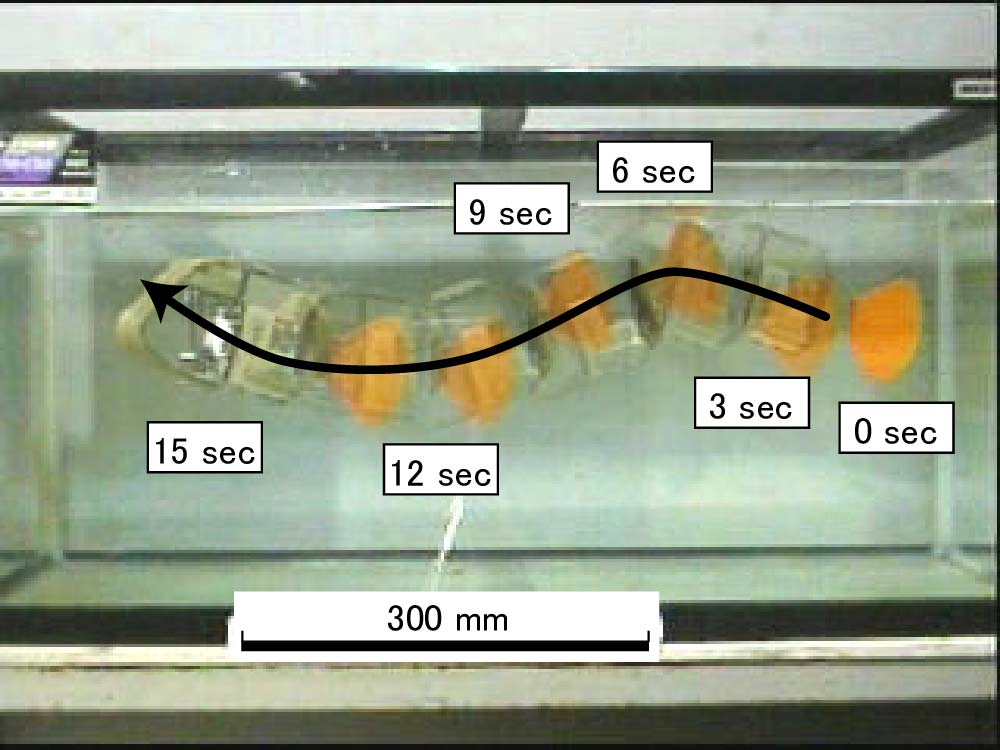
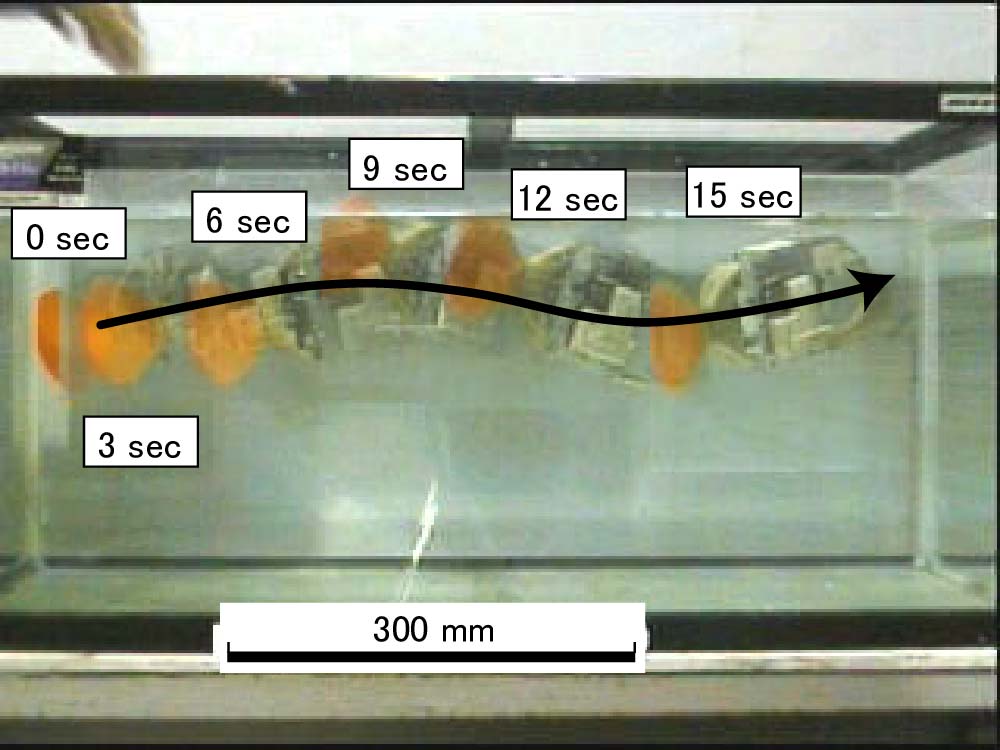
実験用魚ロボット「PF-200」の上下運動
PF-200を上下運動させるには,非常に細かい浮力調整が必要です。下の写真は40×10×2mmのバルサ材を1枚ずつ調整して上下運動を調べた結果です。なお,PF-200の空中重量は543.4 gf,バルサ材1枚当たりの浮力調整量は0.6 gfです。入念な調整を行った後,何とか上下運動を実現できました。
(クリックすると大きい画像が表示されます)   PF-200のCAD図面(準備中)PF-200のマイコン回路とプログラム(準備中) PF-200のCAD図面(準備中)PF-200のマイコン回路とプログラム(準備中)[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] | ||||||||
| Contact khirata@nmri.go.jp |