| Prototype Fish Robot, PF-600 Koichi Hirata, updated on January 25, 2000 
Prototype Fish Robot, PF-600The Prototype Fish Robot, PF-600 was designed and built to measure propulsion performance. The body length is about 600 mm. We wanted to simulate the various motions of high performance fish, those fish with high acceleration and high-sustained speeds. Specifically, was designed to simulate the range of motions exhibited by the pike that is known to have high acceleration and the tuna that has high speed and efficiency. The power source for the tail was adapted from two radio control (R/C) servomotors (servos.) The system is controlled by a personal computer (PC) through a digital to analog converter (D/A) and communicated to the fish robot via the R/C transmitter and receiver. The control system worked out with previous prototypes and used here is realized in the complex and smooth motions of the PF-600.An MPEG movie segment shows two examples of the swimming motions of the PF-600. See the bottom of this page for the link.
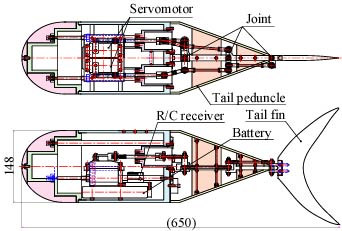
Basic structure of the PF-600The figure to the right shows the structure of the PF-600. A battery, R/C receiver and two servos are located in the body. Two rods connect link mechanisms in the two tail peduncles (forward and tail peduncles), and finally the tail fin through rod seals. For sliding rod seals, slide bearings are used. Other parts that do need to move are sealed with "O" rings.

Link mechanism of the PF-600In the case of the PF-600, three joints are moved by the two servos. One servo moves two joints in the tail peduncle (forward and tail peduncles.) The tail peduncle thus moves flexibly, because the crank arm length and angle may be adjusted suitably. Another servo moves the tail fin joint alone. This allows the phase between the tail assembly and tail fin to be set separately as well as the amplitude of the oscillation.
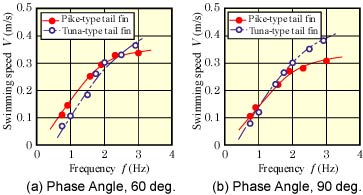
One of the experimental resultsThe swimming speed of the PF-600 has been measured with a pike-type tail fin and a tuna-type tail fin. The figure to the right shows experimental results of relationships between the frequency, f, and the swimming speed, V at the phase angle Beta of 90 degrees. This figure shows that the pike-type fin gets higher speed than the tuna-type fin when the frequency, f is set to a lower value. The tuna-type fin gets highest speed. Both realize their highest speeds with increasing frequency.
CAD data of the PF-600The CAD files (AutoCAD LT 2000, DWG format) are available. You can download and use them just as you please. However, the Japanese fonts may not be displayed correctly on your PC.
CAD data of the PF-600 (Only Assebling plans, ZIP, 294 kMB)
Movie of the PF-600A demonstration movie is available here.
Demonstration movie (MPEG, 1.2MB)  Development Diary of the PF-600 [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |