| 推進性能実験用魚ロボット「PF-600」 2000/1/14更新 平田宏一 
推進性能実験用魚ロボット「PF-600」PF-600は、詳細な推進性能を測定するために設計・試作した全長600mmの実験用魚ロボットです。加速性に優れたニジマスから高速・高効率なマグロまで,様々な運動パターンが模擬できるように設計しました。尾柄・尾ひれの動力源にはR/Cサーボモータ(双葉S3801)を使用し,D/Aコンバータを取り付けたパーソナルコンピュータにより複雑かつスムーズな動きを実現できます。
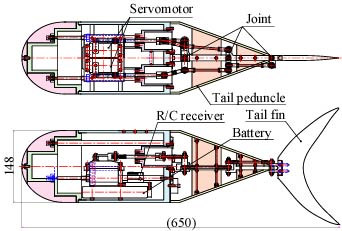
PF-600の基本構造右図にPF-600の構造を示します。胴部にバッテリ,サーボモータ,R/C受信機を内蔵し,2本のロッドがシールを介して尾部のリンク機構へとつなげられています。ロッドシールには市販の滑り軸受(ASK社)を使用しています。頭部等の静止面シールにはOリングを使用しています。

PF-600のリンク機構PF-600では、3つの関節を2つのサーボモータで動かしています。詳細については省略しますが,1つのサーボモータで尾柄の2つの関節を動かします。クランクアームの長さや角度を調整してありますので,尾柄はしなるような動きになります。また,別のサーボモータで尾ひれを動かしますので,尾柄と尾ひれとの位相差や振幅(振れ角度)を独立させて設定できます。
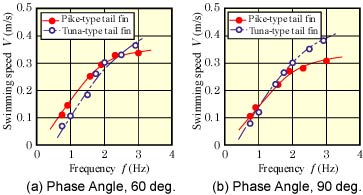
実験結果の一例ニジマス形の尾ひれとマグロ形の尾ひれを用いて遊泳速度を測定しました。右図は,尾柄と尾ひれとの位相差βを90degとした場合,尾柄・尾ひれの周波数fと遊泳速度Vとの関係を示しています。これより,低い周波数の場合,ニジマス形の尾ひれの方が高い速度が得られ,高い周波数になるとマグロ形の尾ひれの方が高い速度が得られていることがわかります。
PF-600のCADデータPF-600のCADデータ(AutoCAD LT 2000,DWG形式)を準備しました。不十分な図面ですが,ご自由にお使いください。
PF-600のCADデータ(組立図のみ)(ZIP, 294kMB)
PF-600のムービーデモンストレーションムービーを準備しました。 PF-600開発日誌 [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |