|
|
これからの魚ロボットの研究

今までに様々な魚ロボットを試作し,それらの基本性能を測定していました。今後予定している研究課題として,多形式の実験用魚ロボットの開発,詳細な流体力学的検討,そしてセンサ技術と制御技術の高度化があげられます。
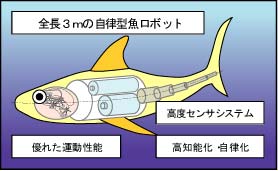
以上の研究を進めた後,本研究の終了時には,全長3m程度の高性能自律型魚ロボットおよび全長50mm程度のマイクロ魚ロボットを完成させたいと考えています。

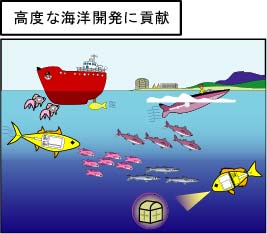
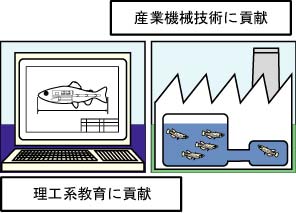
魚ロボットの研究成果は,船舶や潜水船のための新しい高効率推進装置を提案できると考えています。また,魚のように海中を自由に泳ぎ回り,しかも高効率で機敏な動きができる魚ロボットが開発されれば,海中調査や生態観測に極めて役立つものと考えています。また,理工系学生のための教材や工場内の配管設備の保守・点検などへの応用もできると考えています。
 ここをクリックすると,魚ロボットのアニメーションを見ることができます。 |
|
[Fish Robot Home Page] [ Hirata HOME ] [ Environment and Energy Department ] [ NMRI HOME ] |
|
|
| このページに関するお問い合わせはkhirata@nmri.go.jpまでお願いします |
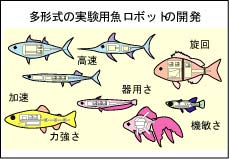 (1) 多形式の実験用魚ロボットの開発
(1) 多形式の実験用魚ロボットの開発 (2) 流体力学的検討
(2) 流体力学的検討 (3) センサ技術と制御技術の高度化
(3) センサ技術と制御技術の高度化