| Assistance Device for a Hand-operated Wheelchair March 2002, Koichi Hirata and Teppei Kono 
 Outline of This Study
Outline of This Study
When a wheelchair is driven on a waving ship, the operation becomes very hard, and it has highly dangerous, such as reckless driving and falling. In this study, we consider the operation of a wheelchair to have a small side-rolling motion. Then we develop an assistance device for a waving condition.
Assistance DevicesA hand-operated wheelchair runs snaky on a waving ship. Thus, we consider several assistance devices for evasion of the snaky running.
B. Additional drive power control
C. Brake control of rear tires
D. Control of the center of gravity
Structure of the Assistance DeviceAfter the above discussions, we adopted "C. Brake control of rear tires" for the first assistance device. Because, it was considered that the brake control device can be set easily to any wheelchairs, also it is accurate and safety. The follows pictures shows the developed assistance device. When a person drives a wheelchair on a waving condition, he must control brake force suitably. This assistance device has a microcomputer and a R/C servomotor, and can adjust the brake force optionally. Also, we developed a slope angle sensor with a pendulum. The sensor has micro-switches, and they perceive at slope angle of 3 and 5 deg. The microcomputer controls the brake force based on the signals of the switches.
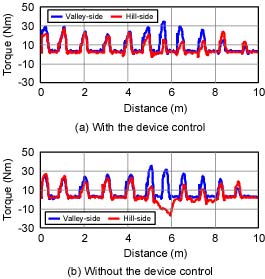
Performance of the Assistance Device
ConclusionIn this study, it was confirmed that the assistance device produces the easy operation of a driver on the waving slope. However, as the waving of a real ship is too complex, it is considered that the pendulum sensor, which was developed in this study, cannot measure a condition of a wheelchair suitably. We think that the assistance device becomes high performance by adoption of a multi-axis gravitation acceleration sensor. Also, the assistance device works at every condition increasing the time to add the drive power to hand-rims. Then a driver feels often to disturb the operation. If the assistance device has the torque sensor, which senses whether the driver adds the power, and if the device works only the time of inertia running, the device will have more better operation feeling.
More Information
| ||||
|
[ Barrier-free HOME ] [ NMRI HOME ] |
||||
|
| ||||
| Contact: khirata@nmri.go.jp |
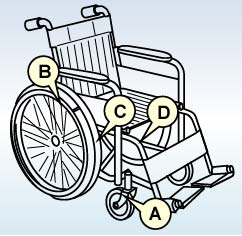 A. Turning angle control of front tires
A. Turning angle control of front tires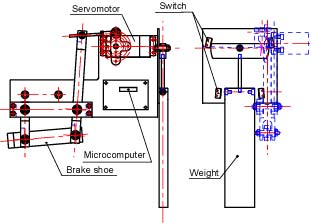

 Development Diary of the Assistance Device
Development Diary of the Assistance Device