手動車いす用走行補助装置の開発 2002年3月 平田宏一,河野哲平 |
||
 研究テーマの概要
研究テーマの概要 |
||
| 動揺している船舶において手動車いすを運転する場合,その操作は著しく難しくなり,暴走・転倒といった危険性が高まります。本研究では,車いすの横ぶれを少なくする方法について検討し,動揺条件下において暴走を防止するための走行補助装置を提案します。さらに設計・試作した走行補助装置の有効性を明らかにすることを目指しています。 | ||
|
車いすの横ぶれを少なくする走行補助装置 |
||
|
車いすは,船の動揺の影響を受けて,蛇行走行になりやすくなります。そこで,蛇行(横ぶれ)を防ぐための走行補助装置を考えました。
B. 後輪の駆動力制御
C. 後輪のブレーキ制御
D. 重心位置制御 |
||
|
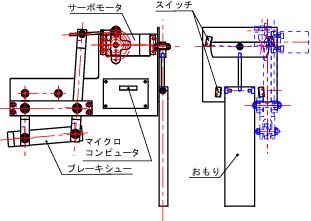
手動車いす用走行補助装置の構造 |
||
|
以上のような検討を行ったのち,本年度は,どのような手動車いすにも取り付けが簡単であり,しかも正確で安全な補助効果を得られると考えられた「C. 後輪のブレーキ制御」の実験装置を開発することにしました。
|
||
|
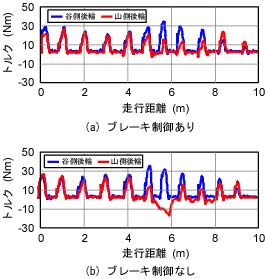
手動車いす用走行補助装置の性能 |
||
|
||
|
まとめ |
||
| 本研究で開発した補助ブレーキ装置は,波状の走行面において操作の困難さを低減できることを確認できました。しかし,船舶の動揺は非常に複雑であり,本走行補助装置に採用した振り子式センサでは車いすの状態を的確に測定できないと考えられます。多軸の重力加速度センサなどを用いることで本装置の高性能化が可能になると考えらます。また,本走行補助装置は,ハンドリムに駆動力を加えてる時にもブレーキが働くため駆動の操作をわずらわしく感じることがあります。ハンドリムへの駆動力の有無を感知するセンサを取り付けるなど,慣性走行時のみにブレーキを作動させることができれば,より快適な操作を期待できます。 | ||
|
付録 |
||
 手動車いす用走行補助装置・開発日誌
手動車いす用走行補助装置のデモンストレーションムービー(MPEG1形式,1.3 MB)
手動車いす用走行補助装置・開発日誌
手動車いす用走行補助装置のデモンストレーションムービー(MPEG1形式,1.3 MB) |
||
| [ Barrier-free HOME ] [ NMRI HOME ] | ||
| このページに関するお問い合わせはkhirata@nmri.go.jpまでお願いします | ||

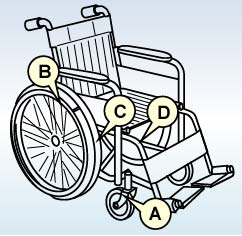 A. 前輪キャスタの旋回角制御
A. 前輪キャスタの旋回角制御