| Development of an Electric Wheelchair Model November 2001, Koichi Hirata and Hiroaki Sakakibara 
 Introduction
IntroductionWe do not know the driving and operating characteristics of an electric wheelchair on a waving ship. In order to investigate the characteristics of the electric wheelchair in detail, we design and develop a model of the electric wheelchair, which has about 200 mm length.
Difference of an Electric Wheelchair and a Hand-operated Wheelchair
(1) The electric wheelchair has motors and a battery, so it is heavy weight.
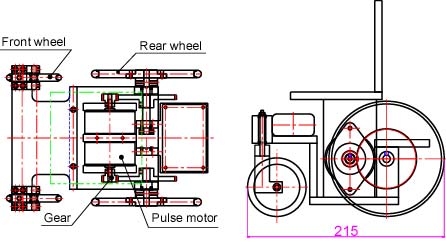
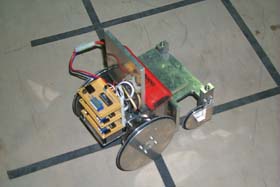
Structure of the Electric Wheelchair ModelThe follows figures shows the electric wheelchair model. Two pulse motors drive rear wheels. A pulse motor can be controled the revolution angle easily, then it can give the rear wheel in accurate motions. Also, the pulse motors are controled by microcomputers, so the electric wheelchair model can work skillfully by programs on the microcomputers.
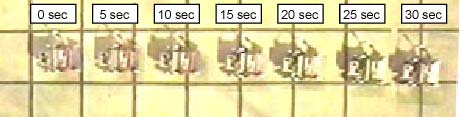
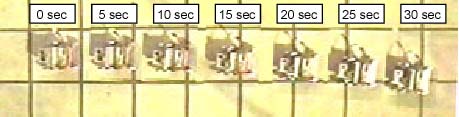
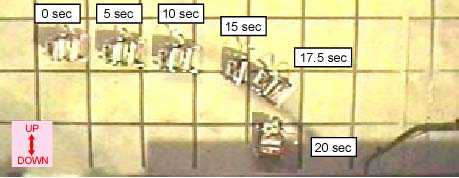
Experiments on a SlopeFollows composited photographs show the experimental results of the wheelchair model. The wheelchair model went across on a slope, which has 0 to 9 degrees of the slope angle. From these results, it was clarified that the turning to the down side increases with increasing of the slope angle, and the turning is smaller than that of a hand-operated wheelchair. It is caused that the right and the left rear wheels moves in the same revolution angle by the pulse motors. Therefore, the turning to the down side is affected by a slip of the rear wheel only. If it has no slip, the wheelchair keeps the straight line even if it runs on a slope. Also, when the wheelchair model ran on the slope of 9 deg, it turned rapidly after 15 sec. It is caused that the rear wheel sliped when the wheelchair model looked the down side. Because, when the wheelchair looks the down side, the vertical force to the rear wheel becomes small.
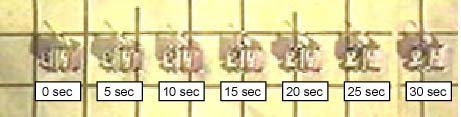 (a) Slope angle, 0 deg
Experiments on a Waving Bench
|
|
[ Barrier-free HOME ] [ NMRI HOME ] |
|
|
| Contact: khirata@nmri.go.jp |
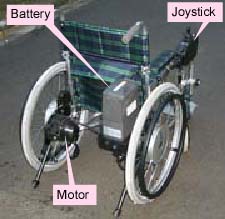 The figure to the right shows an example of an electric wheelchair. It does not have a mechanical controled steering wheel like a hand-operated wheelchair. Electric motors drive rear wheels. And, difference of the driven force to each wheel realizes turning motions. Differences of the electric wheelchair and a hand-operated wheelchair are in follows.
The figure to the right shows an example of an electric wheelchair. It does not have a mechanical controled steering wheel like a hand-operated wheelchair. Electric motors drive rear wheels. And, difference of the driven force to each wheel realizes turning motions. Differences of the electric wheelchair and a hand-operated wheelchair are in follows. Development Diary of the Electric Wheelchair Model
Development Diary of the Electric Wheelchair Model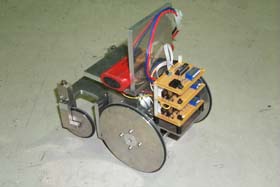

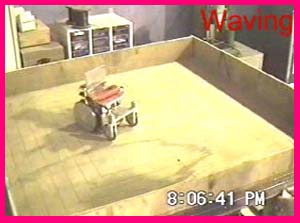 The wheelchair model ran on the waving bench, which was developed for wheelchair models. In the condition of the maximum angle, 5 deg and the cycle, 1 sec approximately, the wheelchair model worked suitably without the slip.
The wheelchair model ran on the waving bench, which was developed for wheelchair models. In the condition of the maximum angle, 5 deg and the cycle, 1 sec approximately, the wheelchair model worked suitably without the slip.