 電動車いす模型の開発 電動車いす模型の開発2001年11月 平田宏一,榊原寛明 |
 電動車いす模型の開発
電動車いす模型の開発 |
| 動揺している船舶における電動車いすを工学的に調査した例は少なく,その走行特性や操作特性については明らかではありません。本研究では,全長200 mm程度の電動車いす模型の設計・試作を行い,電動車いすの走行特性あるいは操作特性について明らかにすることを目指しています。 |
|
電動車いすと手動車いすの相違 |
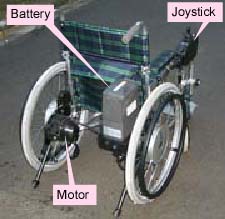 右図に示す電動車いすは,手動車いすと同様,自動車のようなステアリング機構を持っていません。そして,電気モータによって後輪に駆動を与えることで前進・後進し,左右後輪の駆動力の差を利用して旋回します。電動車いすが手動車いすと異なる点は以下の通りです。 右図に示す電動車いすは,手動車いすと同様,自動車のようなステアリング機構を持っていません。そして,電気モータによって後輪に駆動を与えることで前進・後進し,左右後輪の駆動力の差を利用して旋回します。電動車いすが手動車いすと異なる点は以下の通りです。(1) 電気モータやバッテリを搭載しているため,重量が重い。 (2) 1本のジョイスティックで前進・後進・旋回の操作を行う。 (3) 後輪に連続した駆動力が与えられる(慣性走行がほとんどない)。 |
|
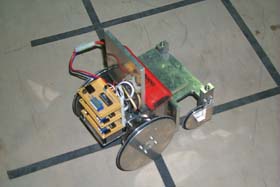
電動車いす模型の構造 |
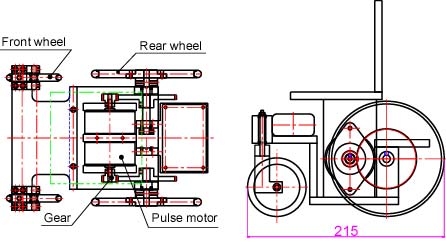
下図に示す電動車いす模型は,2つのパルスモータにより後輪を駆動します。パルスモータは,簡単に回転角度制御をできるため,左右後輪に正確な回転運動を与えることができます。また,パルスモータはマイクロコンピュータの信号によって運転しますので,マイクロコンピュータに書き込んだプログラムによって自由な運転を実現できます。 電動車いす模型の開発日誌
電動車いす模型のデモンストレーションムービー(MPEG1形式,4.1 MB)
電動車いす模型のCAD図面
マイクロコンピュータのページ:マイコン回路についてはこちらをご覧ください。
電動車いす模型の開発日誌
電動車いす模型のデモンストレーションムービー(MPEG1形式,4.1 MB)
電動車いす模型のCAD図面
マイクロコンピュータのページ:マイコン回路についてはこちらをご覧ください。 |
|
|
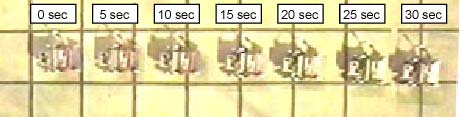
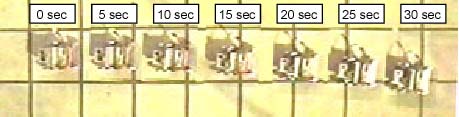
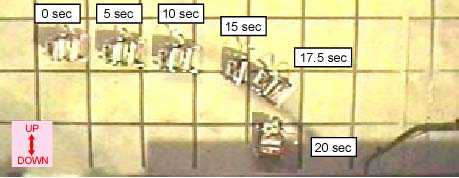
傾斜台における横断時の走行結果 |
| 下の合成写真は,傾斜台(傾斜角0〜9 deg)において,電動車いす模型を走行させた結果です。傾斜角を大きくするに従って,落下方向への旋回が大きくなりますが,その旋回の大きさは手動車いすに比べてかなり小さいことがわかりました。これは,パルスモータの回転角度制御によって,左右後輪が全く同じ回転運動をしているためです。したがって,落下方向への旋回は,後輪のスリップだけに影響を受け,スリップがなければ路面が傾斜していても直進することができます。また,傾斜角を9 degとした場合,走行開始15秒後から,急激に旋回していることがわかります。これは,車いす模型が徐々に下を向いた結果,山側後輪の荷重が小さくなり,山側後輪が急激にスリップしたためであると考えられます。
傾斜台走行試験のムービー(MPEG1形式,6.0 MB) |
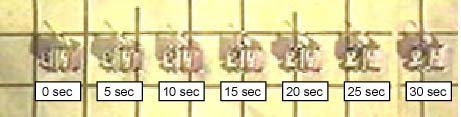 (a) 傾斜角0 deg
|
|
動揺台における走行結果 |
|
|
| [ Barrier-free HOME ] [ NMRI HOME ] |
| このページに関するお問い合わせはkhirata@nmri.go.jpまでお願いします |

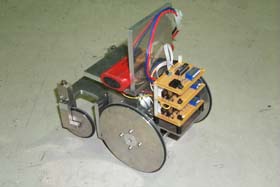

 別途,製作した模型車いす用動揺台の上で電動車いす模型を走行させました。最大傾斜角度5 deg程度,周期1秒程度の動揺条件下であっても,電動車いす模型は安定した走行ができることが確認できました。
別途,製作した模型車いす用動揺台の上で電動車いす模型を走行させました。最大傾斜角度5 deg程度,周期1秒程度の動揺条件下であっても,電動車いす模型は安定した走行ができることが確認できました。