 計測用車いすの開発 計測用車いすの開発~ハードウェアの紹介~  |
| ●はじめに |
 このページでは,船上試験などに使用するために開発した計測用車いすを紹介します。 このページでは,船上試験などに使用するために開発した計測用車いすを紹介します。
|
| ●測定装置系統と構成部品 |
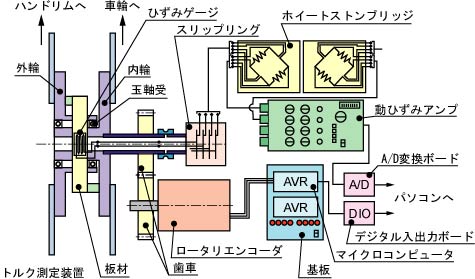 手動車いすの基本的な運動特性を把握するため,左右の車輪に加えるトルクと車輪の回転角度を測定します。これらの測定データをノートパソコンで処理することで,車いすの速度や走行軌跡,仕事率(出力),変動率などを求めることができます。 手動車いすの基本的な運動特性を把握するため,左右の車輪に加えるトルクと車輪の回転角度を測定します。これらの測定データをノートパソコンで処理することで,車いすの速度や走行軌跡,仕事率(出力),変動率などを求めることができます。右図に測定装置系統,下表に主な構成部品を示します。測定機器の測定間隔(サンプリング周波数)や車輪の回転角度の測定精度(ロータリエンコーダのパルス数),最大トルクなどは,本計測用車いすを設計する前の予備実験の結果に基づき決定しました。 |
 |
| ●回転トルク測定装置 |
 車輪に作用する回転トルクを測定する方法として,軸のねじりを直接測定する方法や市販のトルク計を用いることなどが考えられましたが,本計測用車いすにおいては,回転トルクを板材の引張力・圧縮力に変換し,板材のひずみを汎用箔ひずみゲージで測定することとしました。手動車いすの車輪に作用するトルクは,運転条件によって最大値が大きく変わります。汎用箔ひずみゲージを用いた方法は,安価であるばかりでなく,板材の厚さや幅を変更することで測定範囲を幅広く設定できるという特徴があります。 車輪に作用する回転トルクを測定する方法として,軸のねじりを直接測定する方法や市販のトルク計を用いることなどが考えられましたが,本計測用車いすにおいては,回転トルクを板材の引張力・圧縮力に変換し,板材のひずみを汎用箔ひずみゲージで測定することとしました。手動車いすの車輪に作用するトルクは,運転条件によって最大値が大きく変わります。汎用箔ひずみゲージを用いた方法は,安価であるばかりでなく,板材の厚さや幅を変更することで測定範囲を幅広く設定できるという特徴があります。右写真にトルク測定装置の外観を示します。車輪と接続された内輪とハンドリムに接続された外輪とは玉軸受で支持されています。内輪と外輪の間には,厚さ1.5 mmのアルミニウム合金製(A2024S)の板材を取り付け,その中央の表・裏両面に汎用箔ひずみゲージを接着し,引張力及び圧縮力により生じるひずみを検出します。 車輪を固定している車いすのシャフトに直径6.5 mmの穴をあけ,それに外径6 mm,内径4 mmのステンレス鋼製パイプを通し,パイプ両端を玉軸受で支持しました。トルク測定装置が車輪の回転運動に伴い回転するため,ひずみゲージの信号線は,ステンレス鋼製パイプの中を通り,端部に配置したスリップリングに接続されます。さらにホイートストンブリッジ及び動ひずみアンプを介して,ノートパソコンのA/D変換ボードに入力され,処理されます。 試作直後,実際に車いすを運転し,トルク測定装置の動作確認を行いました。これにより,内輪と外輪を支持している玉軸受の剛性は十分であり,ハンドリムに横方向(駆動方向に垂直)の外力を与えても,測定値はほとんど影響を受けないことが確認されました。また,数回のキャリブレーションの結果,測定装置の再現性にもほとんど問題がないことがわかりました。  キャリブレーション結果の一例
キャリブレーション結果の一例 |
| ●回転角度の測定 |
 手動車いすの車輪は,一般の回転機械に比べて,回転数が低く,回転数変動が大きいという特徴があります。したがって,車輪の回転角度から速度や走行軌跡を求めるためには,回転角度は高い精度で測定する必要があります。このような検討に基づき,回転角度の測定には,1回転に2000個のパルスを発生するインクリメンタル形ロータリエンコーダを使用することとしました。右写真に示すように,ロータリエンコーダは,回転軸から歯車を介して取り付けられます。 手動車いすの車輪は,一般の回転機械に比べて,回転数が低く,回転数変動が大きいという特徴があります。したがって,車輪の回転角度から速度や走行軌跡を求めるためには,回転角度は高い精度で測定する必要があります。このような検討に基づき,回転角度の測定には,1回転に2000個のパルスを発生するインクリメンタル形ロータリエンコーダを使用することとしました。右写真に示すように,ロータリエンコーダは,回転軸から歯車を介して取り付けられます。ロータリエンコーダは,約90°の位相がずれた2相のパルス(A相,B相)を発生します。2相のパルスは,マイクロコンピュータに入力された後,12ビット(4096カウント)の信号に変換され,ノートパソコンのデジタル入出力ボードに取り込まれます。
マイクロコンピュータのプログラム |
| ●測定機器とノートパソコン |
| ホイートストンブリッジ,動ひずみアンプ及びマイクロコンピュータの基板は,座席後方のアルミニウム合金板上に配置されています。A/D変換ボードとデジタル入出力ボードを取り付けたノートパソコンは,車いすの操作者自身が測定を行う場合は座席前方に,別の者が測定する場合は座席後方に配置されます。測定時,ノートパソコンの画面には速度や走行軌跡などの詳細な測定結果が表示されます。 |

 |
|
[ Wheelchair Measuring System ] [ Barrier-free HOME ] [ NMRI HOME ] |
| このページに関するお問い合わせはkhirata@nmri.go.jpまでお願いします |