|
| ||||||
|
講義ノート:もの作りのための機械設計工学 第1章 機械設計の概要
機械設計は,設計者の考えに基づき進められていく。設計者は何を考えて,実際の機械を設計したのか,以下,筆者が実際に設計・試作したいくつかの実験用機器を紹介する。なお,詳細についてはそれぞれのリンクページで紹介している。
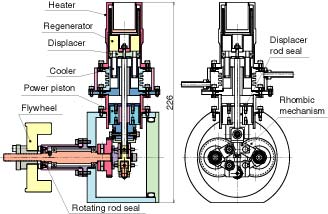
 1.3.1 小型スターリングエンジン
1.3.1 小型スターリングエンジン
 小型スターリングエンジン「Mini-Ecoboy」のページへ
小型スターリングエンジン「Mini-Ecoboy」のページへ
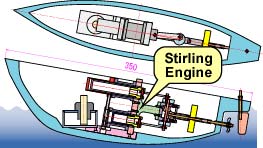
1.3.2 模型ボート
「模型スターリングエンジン船を作ろう」のページへ
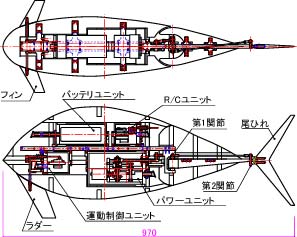
1.3.3 実験用魚ロボット
「実験用魚ロボットUPF-2001」のページへ
| ||||||
|
[ Previous ] [ Mechanical Design ] [ Next ] [ Hirata HOME ] [ Power and Energy Engineering Division ] [ NMRI HOME ] | ||||||
|
| ||||||
| Contact khirata@nmri.go.jp |