|
| ||||||||||||
|
講義ノート:もの作りのための機械設計工学 第6章 歯車機構の設計
本節では,歯車を使ったいくつかの機械を紹介し,歯車を選定する際や歯車機構を設計する際の留意点について説明する。
 6.4.1 人力ボートの動力伝達機構
6.4.1 人力ボートの動力伝達機構図6.21および図6.22は,人間の力で推進する競技用ボートである。双胴船の上に自転車と同じような形状をしたフレームを取り付け,ペダルを回転させる動力を水中のプロペラに伝達している。
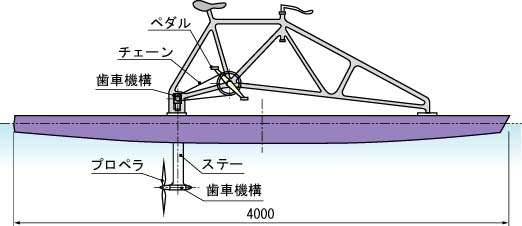 図6.22 人力ボートの構造
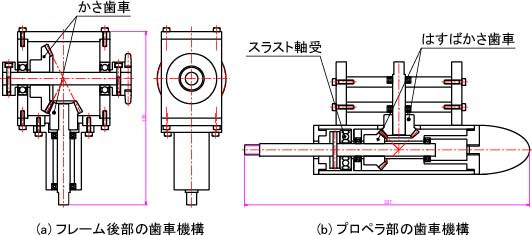 図6.23 人力ボートの歯車機構
 人力ボートのデモンストレーションビデオ(MPEG1,3.6MB) 人力ボートのデモンストレーションビデオ(MPEG1,3.6MB)
6.4.2 模型車いすの歯車機構
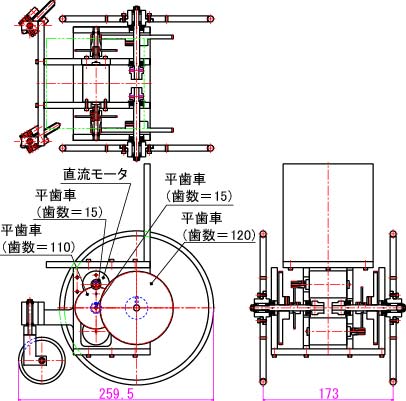
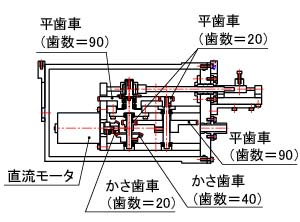
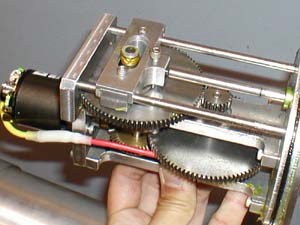
6.4.3 魚ロボットの歯車機構図2.14に示した魚ロボットの歯車機構(図6.26)は,(i) 直流モータ,(ii) 歯車減速機構,(iii) 回転運動を往復運動に変換するための機構,(iv) 水密のためのシール機構,(v) 往復運動を尾部へと伝えるための連結機構から構成されている。以下,歯車減速機構の設計手順について概説する。詳細については,下記のホームページを参照していただきたい。
流体力学的な検討を行い,尾ひれを設定した周波数で運動させる場合の最大トルクを求め,負担が大きい要素部品(歯車,軸,ボルトなど)について検討する。 (2) 平均出力の見積もり 同様に,平均出力(W)を求め,使用可能なモータを選定する。 (3) 減速比の選定 モータの特性を踏まえて,歯車機構の減速比を決める。 (4) 歯車の構成 機構の小型化や他の要素とのバランスを考え,具体的な歯車構成を検討する。本魚ロボットでは,一対のかさ歯車と4枚の平歯車を用いることとした。 なお,実際には,これら全ての機構や魚ロボット全体の構造との兼ね合いを考えながら設計を進めなければならない。
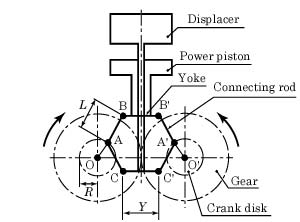
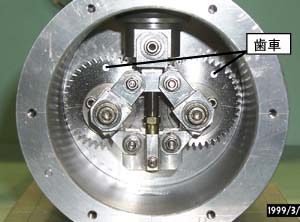
6.4.4 スターリングエンジンのピストン駆動機構
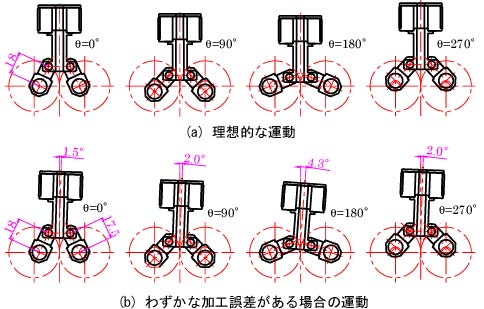 図6.29 ロンビック機構の運動 | ||||||||||||
|
[ Previous ] [ Mechanical Design ] [ Next ] [ Hirata HOME ] [ Power and Energy Engineering Division ] [ NMRI HOME ] | ||||||||||||
|
| ||||||||||||
| Contact khirata@nmri.go.jp |




{kind=link}