講義ノート:もの作りのための機械設計工学
第8章 市販部品を利用する設計
8.1 電気モータ
機械は原動機によって動かされる。主な原動機として,熱エネルギーを利用した熱機関(エンジン)と電気エネルギーを利用した電気モータがある。エンジンは燃料を補給するだけで高出力な機械的エネルギーが得られるため,船舶や自動車などの輸送機械や電気エネルギーを作り出すための発電機などに使われている。一方,電気モータは,バッテリ(電池)や発電所から送電される電力を利用し,主に屋内で利用する機械で利用されている(図1.1(b),(d)など)。
 8.1.1 モータの種類と特徴
8.1.1 モータの種類と特徴
電気モータは,使用する電源の種類(直流・交流),出力レベル,制御方法など,様々な形式のものが市販されている。以下,代表的な電気モータの特徴と使用例を紹介する。
(1) 直流モータと交流モータ
電気モータには,乾電池に代表されるような直流電源を使用する直流モータと家庭のコンセント(100 V)に代表されるような交流電源を使用する交流モータがある。これらのモータは,その大きさや構造,制御方法が様々であるため,一概に特徴を比較することは難しい。以下,それらの最も代表的な特徴を説明する。
図8.1に示す直流モータは,与える電圧に応じて回転数・出力を制御でき,しかも応答性がよく,扱いやすい。そのため,小型機械やバッテリを使用する機械の原動機として使われることが多い。また,制御性に優れ,効率が高いため,最近までは鉄道用モータとしても使用されてきた。しかし,交流モータと比べて価格が高く,ブラシという消耗部品が存在するため,信頼性に問題がある。図8.2に示す交流モータは,価格が安く,大型化・大出力化が容易である。そのため,工作機械をはじめとする汎用モータとして広く使用されている。

図8.1 直流モータの例
|

図8.2 交流モータの例
|
(2) ステッピングモータ
|
図8.3に示すステッピングモータは,ステップモータあるいはパルスモータなどとも呼ばれる。回転角度が,デジタル入力によるパルスの数に比例するという特徴がある。この特徴からステッピングモータは,高精度な運動を必要とする機械に使用されている。なお,応答速度は他のモータと比べて遅く,パルスを発生させるための回路(ドライバ)が必要となる。図8.4に示す模型車いすでは,左右後輪に正確な回転運動を与える必要があったため,ステッピングモータを使用している。
|

図8.3 ステッピングモータの例
|
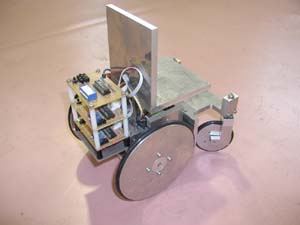
(a) 模型車いす
|
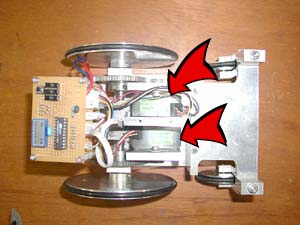
(b) ステッピングモータ
|
図8.4 ステッピングモータを用いた模型車いす
(3) サーボモータ
サーボ制御(サーボ機構)は,自動制御機構の一つであり,制御の対象の状態を測定し,基準値と比較して自動的に修正制御するものである。すなわち,任意の回転角度に合わせる制御機構を持つモータをサーボモータと呼んでいる。
|
図8.5に示すラジコン模型に使われているサーボモータは,小さいケースに小型の直流モータ,減速歯車機構および回転角度センサ(回転式可変抵抗)およびサーボ制御のための電子回路が内蔵されている。ラジコン模型用サーボモータは,扱いやすく,しかも安価であるため,前章までに紹介してきた魚ロボットなどにも利用されている。
|
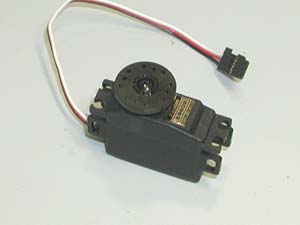
図8.5 ラジコン模型用サーボモータ
|
|
図8.6に示す船舶バリアフリー研究に用いる動揺台(ターンテーブル)では,出力200 Wのサーボモータが使用されている。本動揺台では,5つのモータをサーボ制御することで,直径3 mのテーブルを最大2度の傾斜角度,2秒〜10秒程度の周波数で揺らすことができる。
|

図8.6 動揺台
|
 ハイブリッド自動車
ハイブリッド自動車
|
図8.7はガソリンエンジンと電気モータを組み合わせた自動車用ハイブリッドシステムである。本システムは,エンジンの出力を最適な配分で車輪の駆動と発電機に分割し,発電した電気でモータを回して走行を補助している。エンジンとモータをうまく組み合わせることによって,低公害で高効率な動力システムを実現している。
プリウスのページ(トヨタ自動車)
|
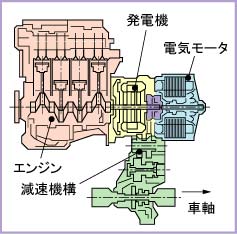
図8.7 自動車用ハイブリッドシステム
(参照:プリウスのページ)
|
|
8.1.2 モータを使用する際の注意点
実際の機械設計において,電気モータを選定する場合,使用する機械に必要な出力やトルク,あるいは回転数,制御方式などをしっかりと検討しなければならない。以下,モータを使用する際の主な注意点をあげる。
(1) モータの特徴
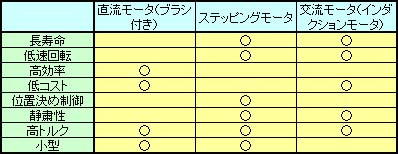
以上のようにモータの種類は多い。それぞれのモータの特徴を踏まえて,使用する機械に最も適したモータを選択する(表8.1)。
表8.1 電気モータの特徴
(2) トルクと回転数
モータの動力を機械の運動に利用する場合,その機械に必要とされるトルク,出力,回転数に適したモータを選定する。通常,モータのカタログには,定格トルクや定格回転数などが表示されているので(表8.2参照),それらと機械の仕様を比較・検討し,モータを選定する。なお。モータの回転軸をそのままの状態で機械の運動に利用することは少なく,歯車機構などにより減速するのが普通である(第6章参照)。
|
表8.2 電気モータの性能表(マブチRS-540SH)

|
(3) 電源の検討
交流電源を使用する場合,家庭用コンセントや工場の配電盤などの容量(通常は最大電流)や形態(単相または三相),電圧(100 Vまたは200 V)などを確認する必要がある。また,バッテリや乾電池を使う場合,連続使用時間が問題となることがある。そのような場合,電気モータの消費電力に見合った容量を持つバッテリを選ぶか,あるいは高効率な電気モータを選ぶことになる。
| {kind=link}