|
| ||||||||||||||||||||||||||||
|
講義ノート:もの作りのための機械設計工学 第8章 市販部品を利用する設計
メカトロニクスとは,エレクトロニクス(電子工学)の技術と機械を結び付けたものであり,機械の制御などに電子技術を応用し,機械の高性能化・自動化を図るために利用される。最近では,半導体製造技術の発展により,日常使われる多くの機械が電子制御化されている。以下,機械の制御について簡単に説明し,メカトロニクスの基礎となるセンサとマイクロコンピュータについて簡単に説明する。
 8.2.1 機械の制御
8.2.1 機械の制御機械の制御とは,目的とする状態に保つために適当な操作を加えることである。一般に,機械工学の分野においては,人間が操作することなく,自動的に制御すること(自動制御)を指すことが多い。すなわち,機械を自動制御化することによって,人間への負担が低減できると同時に,機械は適切な運転状態に保たれることになる。機械の自動制御の歴史は古く,18世紀に開発されたワットの蒸気機関にも,エンジン回転数を一定に保つための自動制御装置(遠心調速機)が取り付けられている。一方,最近ではマイクロコンピュータをはじめとする電子技術が発展したため,多くの機械に電子制御が利用されている(図8.9)。
8.2.2 センサセンサには,光を利用したもの,超音波を利用したもの,磁気や電気を利用したものなど様々な種類がある。以下,機械の計測や制御に使われるセンサの一部を紹介する。
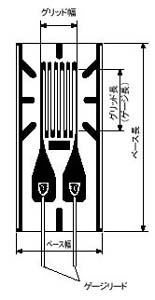
(1) 荷重センサ
オートメーション機械などで部品(品物)の位置を検知するために,光を利用したセンサが使われることがある。図8.13に示すフォトインタラプタと呼ばれるセンサは赤外線を利用したセンサであり,センサ先端に赤外線の発光素子と受光素子が取り付けられており,凹部内の物体の有無を検知できる。図8.14は,魚ロボットの尾ひれの周波数を測定するために使用したフォトインタラプタである。
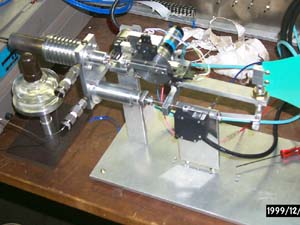
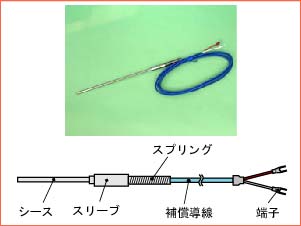
主として熱機械において,温度を測定することは多い。最も代表的な温度センサは,図8.19に示す熱電対である。図8.20に示す実験用スターリングエンジンにおいては,ステンレス製のパイプの内部に熱電対を挿入し,作動ガスの温度を測定している。
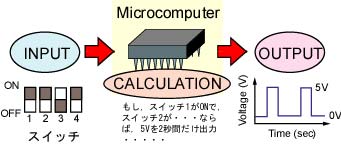
8.2.3 マイクロコンピュータ通常,マイクロコンピュータの原理や構造,あるいはプログラミングは機械設計の範囲ではない。しかし,機械にマイクロコンピュータを組み込むことは多く,実際には機械の設計段階でその使用方法や制御方法を考えるのが普通であるので,機械設計者はマイクロコンピュータについての簡単な知識を持っておく必要がある。また,最近のマイクロコンピュータはとても使いやすくなった。比較的初歩的なプログラミングの知識と簡単な装置(マイコンにプログラムを打ち込むための装置など)があれば,機械を簡単に高機能化することができる。以下,マイクロコンピュータの概要と使用方法について簡単に説明する。
(1) マイクロコンピュータの種類
図8.23に一般的なマイクロコンピュータの使用手順を示す。機械設計と同様,使用目的あるいは仕様によって使用する部品を選択する。そして,回路を作成した後,パソコンでプログラムを作成し,プログラムを書き込む。マイクロコンピュータを使いこなすことができれば,機械設計の幅が広がる。積極的に利用したい要素部品の一つである。
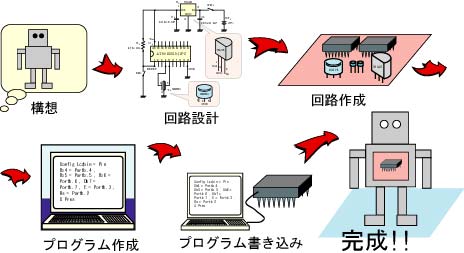 図8.23 マイクロコンピュータの使用手順
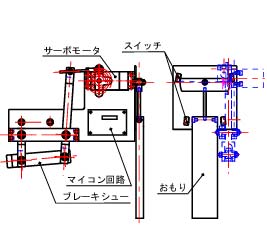
8.2.4 メカトロニクス機械の設計例以上のようなセンサおよびマイクロコンピュータ,図8.4に示したサーボモータを利用した簡単なメカトロニクス機械を紹介する。図8.24は,船舶のような動揺条件下でも車いすが安定して走行できることを目指した走行補助装置である。車いすを動揺条件下で操作する場合,状況に応じてブレーキ力を調整する必要がある。本装置では,マイクロコンピュータとサーボモータを用いることにより,任意にブレーキ力を調節できる構造としている。また,振り子を応用した傾斜角センサを製作し,車いすの左右方向の傾斜角度が約3度及び5度の際に2段階でマイクロスイッチが作動する。このスイッチの組み合わせで,サーボモータの運動を制御し,ブレーキ力を調節している。本車いす走行補助装置の詳細については以下のホームページをご覧いただきたい。
| ||||||||||||||||||||||||||||
|
[ Previous ] [ Mechanical Design ] [ Next ] [ Hirata HOME ] [ Power and Energy Engineering Division ] [ NMRI HOME ] | ||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||
| Contact khirata@nmri.go.jp |
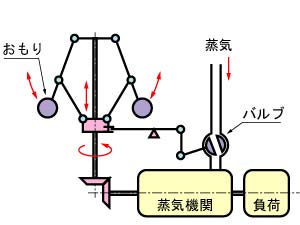

 遠心調速機
遠心調速機