講義ノート:もの作りのための機械設計工学
第9章 機械システム設計
9.4 旋回性能実験用魚ロボットの設計
海中技術は,海洋開発,海洋調査おいて海洋環境保全において極めて重要であり,そのような観点から,海中ロボットの開発が盛んに行われている。他方,水中生活によく適応しているのは「魚」である。そのような観点から,いくつもの魚ロボットの設計・試作を行っている。以下に紹介する魚ロボットは,魚の優れた遊泳能力の一つとしてあげられる旋回性能を調べるために設計・試作したものである。
 旋回性能実験用魚ロボット「PF-300」 旋回性能実験用魚ロボット「PF-300」
 9.4.1 魚ロボットの旋回方法
9.4.1 魚ロボットの旋回方法
旋回性能を調べる魚ロボットを設計するためには,魚ロボットがどのような方法で旋回できるのかを考える必要がある。流体力学や生物学を考えると魚の旋回は極めて複雑な現象であるが,まずは魚ロボットを作り上げることを目的として,次のように簡易的に取り扱うこととした。
実際の魚は,胸びれや腹びれを巧みに利用し,旋回している(図9.19)。魚ロボットは,運動制御を簡略化するために,胸びれおよび腹びれの運動を利用しない構造とした。魚ロボットが尾柄および尾ひれの運動だけを利用して旋回する場合,図9.20に示す3種の旋回方法に分類できると考えられる。それぞれの旋回方法の特徴は以下の通りである。
|
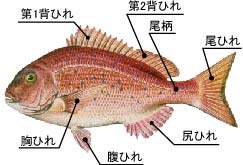
図9.19 実際の魚のひれ
(参考:学研の図鑑 魚,学研(1998))
|
(1) 旋回モードA
図9.20(a)に示す旋回モードAは,尾柄および尾ひれの運動を左右どちらかに偏らせて運動させる旋回方法である。これは,尾柄および尾ひれが推力を発生させながら,魚ロボットの頭部および胴体が船舶における方向舵と同様の働きをすると考えられる。
(2) 旋回モードB
図9.20(b)に示す旋回モードBは,魚ロボットを直進運動させた状態から,尾柄および尾ひれを左右のどちらかに偏らせた状態で運動を停止させて旋回する方法である。この直進運動の慣性力を利用した方法は,体全体で発生する揚力を旋回に利用できるため,上述した尾柄および尾ひれを左右に偏らせながら旋回する方法より,旋回直径を小さくできると考えられる。
(3) 旋回モードC
図9.20(c)に示す旋回モードCは,魚ロボットを静止させた状態から,尾柄および尾ひれを左右のどちらか一方に勢いよく運動させて旋回する方法である。これは,主として運動部の慣性力および抗力を利用し,重心周りの回転モーメントを発生させる方法である。静止時からの旋回が可能であり,旋回直径を最も小さくできると考えられる。しかし,強い慣性力を利用する場合,旋回角度の制御が困難であり,瞬時に旋回させるためには,尾柄および尾ひれを駆動するための十分なトルクを有する動力源が必要となる。
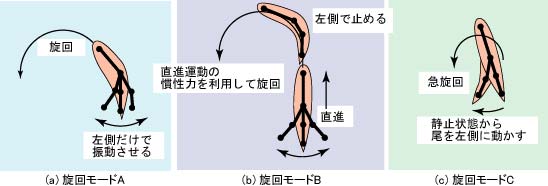
図9.20 魚ロボットの旋回方法
9.4.2 実験用魚ロボットの設計
以上の旋回方法について検討した後,概ね次のような手順で魚ロボットの設計を進めた。
(1) 設計コンセプト
上述の旋回方法について検討した結果,体高が高い体形(側扁形)の魚が急旋回や遊泳速度を変えるのに適していると考えられた。そのため,側扁形の体形を持つタイの体形を参考にして,魚ロボットの設計を進めることとした。さらに,実験の容易性や使用する動力源のトルクなどを考慮して魚ロボットの小型化を目指すこととした。
(2) 基本構造
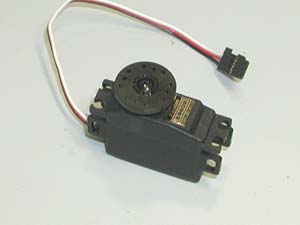
魚の泳法を模擬する場合,尾柄および尾ひれの関節が多いほど滑らかな運動を実現できる。しかし,本魚ロボットでは,構造を略化するために関節を2つとし,尾柄および尾ひれを独立した2個のラジコン模型用サーボモータ(図8.5)で駆動させることとした(図9.21(a))。
また,魚ロボットの基本構造を検討するに当たって,魚ロボットの全長に対するサーボモータに必要なトルクについて検討した。その結果,使用するサーボモータは全長300 mm程度の魚ロボットを駆動させるのに十分なトルクがあることが確認された(図9.21(b))。
|
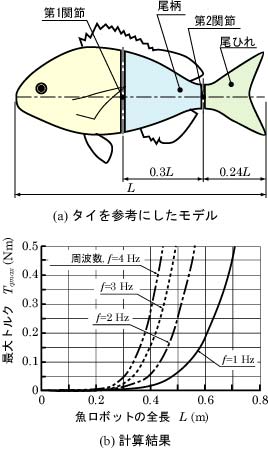
図9.21 魚ロボットの設計
|
(3) 形式の検討
設計指針および基本構造を考慮して,図9.22に示すサーボモータおよびバッテリの配置を提案し,それぞれの形式の特徴について検討した。それぞれの特徴を詳細に検討した結果,タイの体形に類似させることが比較的簡単であり,最も高い旋回性能を有すると考えられるType Dを採用することとし,詳細設計を進めた。
|
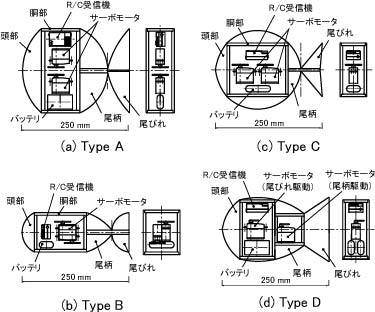
図9.22 形式の検討
|
(4) 詳細構造
以上の検討結果並びにリンク機構の構成等を踏まえて,図9.23および図9.24に示す魚ロボットを試作した。全長は約340 mmであり,頭部にR/C受信機,胴部にバッテリおよび尾柄を駆動させるサーボモータを配置し,尾柄には尾ひれを駆動させるサーボモータを内蔵している。関節の位置は,タイの体形を参考にして概ね決定しているが,関節数が少ないことおよび機械部品の形など等により制限を受けている。
|
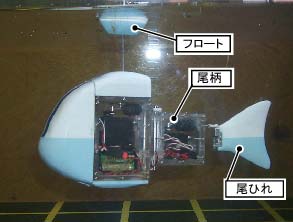
図9.23 魚ロボットの外観
|
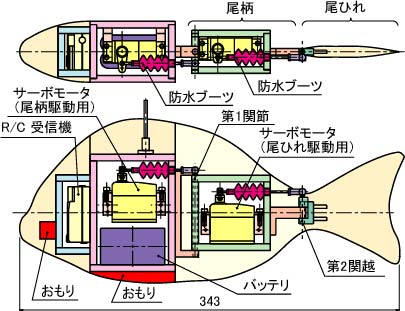
図9.24 魚ロボットの構造
9.4.3 実験用魚ロボットの旋回性能
魚ロボットを試作した後,図9.20に示した3種類の旋回方法で実験を行った。旋回実験は0.9 m×0.9 m,深さ0.4 m程度の小型水槽で行い,水槽の上方約2 mの高さに設置したビデオカメラで得られる画像により,旋回直径,旋回時間および旋回時の魚ロボットの姿勢などを調べた。
(1) 旋回モードA
図9.20(a)に示した尾柄および尾ひれの運動を左右どちらかに偏らせて運動させる旋回方法(旋回モードA)における旋回実験は,尾部の振幅や偏らせ方,周波数などを変化させて測定を行った。実験結果の一例として,図9.25は旋回モードAにおける旋回実験時の合成写真を示している。これより,旋回性能実験用魚ロボットは概ね適切な円運動を行っていることがわかる。また,これらの実験を繰り返すことで,尾部の振幅や偏らせ方,周波数などの影響を調べることができた(図9.26)。
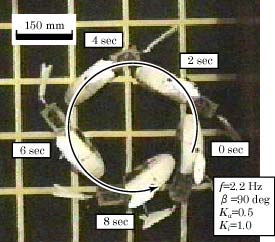
図9.25 旋回モードAの実験結果
|
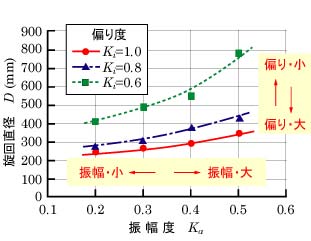
図9.26 旋回モードAの実験結果
|
(2) 旋回モードB
|
図9.27は,図9.20(b)に示した直進運動の慣性力を利用した旋回方法(旋回モードB)における実験結果を示している。本実験において,旋回性能実験用魚ロボットを約0.15 m/sの速度で直進させ(図9.27(a)),尾部を中立状態で静止させた後,約0.3 秒の間に尾柄および尾ひれを左側に運動させた(図9.27(b)~(c))。その後,尾柄および尾ひれを左側に傾けた状態で旋回させた(図9.27(d)~(f))。旋回モードBにおいては,尾部を偏らせることによって生じる流体力(翼の揚力に相当)が旋回性能に大きく影響を与えるため,魚ロボットの初期速度の影響を大きく受けるものと考えられる。
|
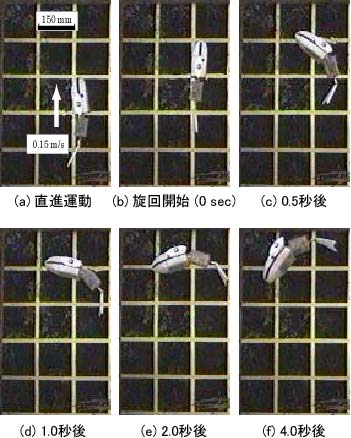
図9.27 旋回モードBの実験結果
|
(3) 旋回モードC
図9.28は,図9.20(c)に示した運動部の慣性力および抗力を利用して回転モーメントを発生させる方法(旋回モードC)における実験結果を示している。本実験では,魚ロボットの尾柄および尾ひれを右側に傾けて静止させた状態から,約0.5 secの間に左側に運動させて急旋回させた。旋回モードCにおける旋回直径は,旋回モードAおよび旋回モードBよりも小さくできることがわかる。しかし,この方法は,強い回転モーメントが発生するため旋回角度の制御が困難であり,瞬時に旋回させるためには,尾柄および尾ひれを駆動させるための十分なトルクを有する尾部の動力源が必要となる。
|
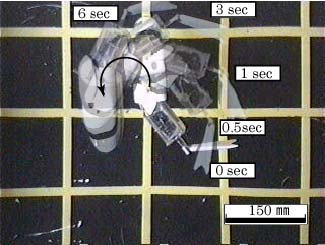
図9.28 旋回モードCの実験結果
|
9.4.4 まとめ
機械システム設計を進める上で,与えられた問題に対する解決手段を考えることが重要である。本魚ロボットの設計例で言えば,魚ロボットの旋回方法を考えたこと,サーボモータやバッテリの配置を考えたことなどである。また,基本構造を決定する際にも,工学的に説明できるような考えを持つことが重要である。
| {kind=link}