| 魚ロボット用スターリングエンジン 1999/12/20更新 平田宏一,植木原明 
セミフリーピストン形スターリングエンジンとは? 右図に本研究で対象としているセミフリーピストン形スターリングエンジンの構造を示しています。ディスプレーサは小型の電気モータで往復運動させますが,ディスプレーサ両端の圧力差は極めて小さいため,ディスプレーサを駆動する電気モータの消費電力はかなり小さくてすみます。
右図に本研究で対象としているセミフリーピストン形スターリングエンジンの構造を示しています。ディスプレーサは小型の電気モータで往復運動させますが,ディスプレーサ両端の圧力差は極めて小さいため,ディスプレーサを駆動する電気モータの消費電力はかなり小さくてすみます。ディスプレーサを往復運動させると,作動空間に圧力変化が生じ,パワーピストンは微小な往復運動を開始します。そして,ディスプレーサの運動をパワーピストンの共振周波数に同調させれば,パワーピストンの変位は増大し,一般のスターリングエンジンと同様に動作します。このエンジンは,パワーピストンの往復運動から直接動力を取り出すことができ,しかもフライホイールを省略できるという特徴があります。
なぜセミフリーピストン形スターリングエンジンは魚ロボットに適しているのでしょうか?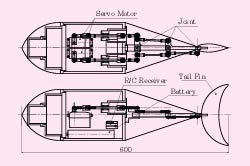 従来から開発されている海中ロボットは,一般に蓄電池を用いた電気モータを動力源としていますが,蓄電池はエネルギ密度が低く,長時間の航行が難しいという問題があります。これに対して,エネルギ密度の高い燃料などを用いる高効率のスターリングエンジンを適用すれば,長時間の航行が可能になると考えられます。
従来から開発されている海中ロボットは,一般に蓄電池を用いた電気モータを動力源としていますが,蓄電池はエネルギ密度が低く,長時間の航行が難しいという問題があります。これに対して,エネルギ密度の高い燃料などを用いる高効率のスターリングエンジンを適用すれば,長時間の航行が可能になると考えられます。一般のエンジンではピストンの往復運動をクランク機構により回転運動へ変換しています。フライホイールにより平滑化された回転運動は,船舶のスクリューの駆動には適していますが,魚ロボットの場合,ピストンの往復運動を直接尾びれの往復運動に利用すれば,クランク機構やプロペラ軸での機械損失を大幅に低減できる可能性があります。
実験用セミフリーピストン形スターリングエンジンの運転結果 本研究の第一段階として,右図のような簡単な実験用エンジンを設計・試作しました。パワーピストンの一端には機械ばねが取り付けられており,ばね定数k及び負荷の大きさを変化させることによって特性を調整できます。
本研究の第一段階として,右図のような簡単な実験用エンジンを設計・試作しました。パワーピストンの一端には機械ばねが取り付けられており,ばね定数k及び負荷の大きさを変化させることによって特性を調整できます。
セミフリーピストン形スターリングエンジンの問題点と今後の課題は? セミフリーピストン形スターリングエンジンを魚ロボットに応用する場合の問題として,低い周波数で運転されるため,所要の出力を得ようとするとエンジンが大型化すること等があります。
セミフリーピストン形スターリングエンジンを魚ロボットに応用する場合の問題として,低い周波数で運転されるため,所要の出力を得ようとするとエンジンが大型化すること等があります。セミフリーピストン形スターリングエンジンは,ロボット開発の観点からすると熱エネルギ利用のアクチュエータと位置づけられ,魚ロボットの尾びれの運動のような周期的な往復運動の駆動源として適していると考えられます。運動制御手法や熱源の検討,エンジンの小型・高出力化等,多くの課題を抱えていますが,セミフリーピストン形スターリングエンジンの魚ロボットへの応用は極めて有望であると考えています。
スターリングエンジンについてもっと知りたい方は,スターリングエンジン・ホームページをご覧ください。
[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |
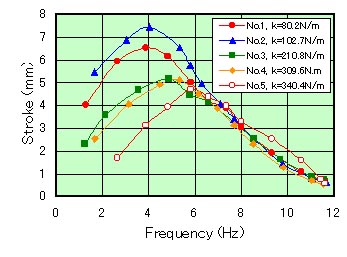 右図に実験結果の一例として,5種類の機械ばねを使用した場合の周波数に対するパワーピストンのストロークを示します。このように,ばね定数を変化させることでエンジン特性が大きく異なることがわかります。今後,この試作エンジンを用いて,基本的な動作を確認し,魚ロボットへの適用性について詳細な考察を行いたいと考えています。
右図に実験結果の一例として,5種類の機械ばねを使用した場合の周波数に対するパワーピストンのストロークを示します。このように,ばね定数を変化させることでエンジン特性が大きく異なることがわかります。今後,この試作エンジンを用いて,基本的な動作を確認し,魚ロボットへの適用性について詳細な考察を行いたいと考えています。