| 実験用魚ロボット「PF-550」 2003/3/3更新 平田宏一,櫻井健太郎 
 実験用魚ロボット「PF-550」の構造
実験用魚ロボット「PF-550」の構造
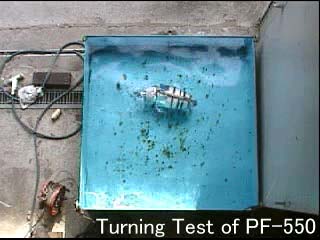
PF-550の遊泳性能PF-550は胴体が太いため直進スピードはあまり高くありません。旋回はまずまずの性能です。全長と同じ程度の直径で旋回できます。上下運動はあまりうまくいきません。重量バランスを入念に調整すれば,何とか上下運動したこともあったのですが,尾部を回転させたときの直進操作が難しく,思い通りの上下運動はできていません。  ビデオギャラリー ~完成までの記録~ ビデオギャラリー ~完成までの記録~
[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
||||||||||||||||||||||||||||||||||
| Contact khirata@nmri.go.jp |



 全体構造
全体構造