Development Diary of the PF-700
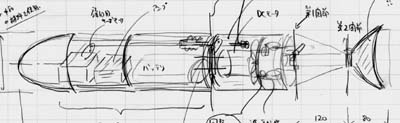
June 2000, ConceptionTo aim to get higher swimming speed, we start to consider a new experimental fish robot, named PF-700. It is used a D/C motor, so the PF-700 gets higher frequency of the tail swing. The body shape is slim like a mackerel pike. A figure to rught shows an early sketch.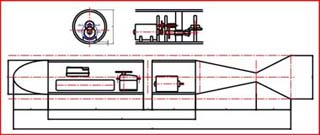
August 2000, Early drawingsMr. Sugiura has developed the PF-700 as his graduation study. At last, he starts to draw a plan. The PF-700 is separated five sections: from the front, a head, the first body including a battery, a servomotor, a receiver and an amplifier, the second body including a D/C motor and gears, a tail peduncle with a cam mechanism, and a tail fin.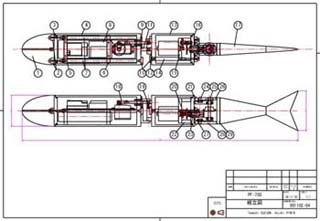
October 2000, Assembling planWe are doing well. An assembling plan has been almost completed. However it is needed that we should discuss the sizes, shapes and constructions of several parts in detail.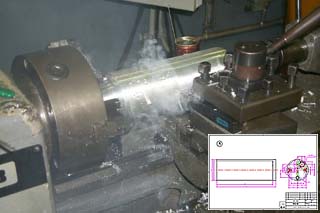
November 10, 2000, Start to makeWe start to make a part. A photo to the right shows the making a body with a lathe.
November 14, 2000, MillingI built parts of board with a milling machine today.November 16, 2000, Building of a body and assembling of a drive mechanismI worked too today. I had a hard time to make a long body (see a photo to left). It almost had finished to assemble a drive mechanism. The mechanism consists of a D/C motor, gears, a joint and a scotch yoke mechanism (see a photo to right).

 November 17, 2000, Painting and building of a tail peduncleThe body was painted (see a photo to left). A tail peduncle is made of hard foam material (see a photo to right).

 November 21, 2000, The first swimmingThe PF-700 was waterproofed, and tried to swim after setting a tentative float. It was very good!We need to make a new float and several reforms. Experiments will be then started.
 

 November 22, 2000, Making a float and test swimmingThe new float was completed. The PF-700 was done some tests. And it was clarified that the probrems were strength of a tail fin, and movement of a joint for turning. Next we will measure swimming speed, frequency and electric energy.
 November 30, 2000, Making a measuring systemWe set up a sencer for measuring of the frequency of the tail fin, an electric board for measuring of electric power and an electric board of a microcomputer. I will show their detailed information in near future.


[ Power and Energy Engineering Division ] [ Hirata HOME ] [ SRI HOME ] |
| Contact khirata@nmri.go.jp |