| Prototype Fish Robot, PF-700 Updated on April 25, 2001 by Koichi Hirata 
Prototype Fish Robot, PF-700 The new prototype fish robot, PF-700 is aimed to get high speed swimming. From experimental results of previous prototype fish robot, PF-600, we confirmed that the higher frequency of tail swing obtains high speed swimming. A D/C motor is adopted for the power source of propulsion, and it can get about 10 Hz of the frequency. The body shape was refered to a mackerel pike, so the PF-700 has very slim body.
The new prototype fish robot, PF-700 is aimed to get high speed swimming. From experimental results of previous prototype fish robot, PF-600, we confirmed that the higher frequency of tail swing obtains high speed swimming. A D/C motor is adopted for the power source of propulsion, and it can get about 10 Hz of the frequency. The body shape was refered to a mackerel pike, so the PF-700 has very slim body.

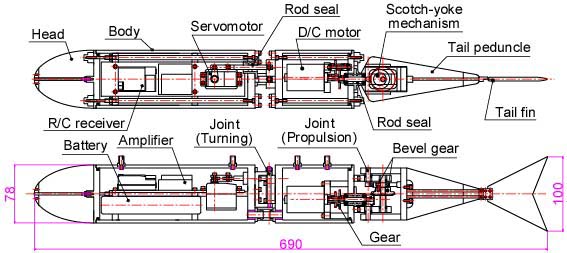
Structure of the PF-700The PF-700 has about 700 mm of body length, and 80 mm of body diameter. It consists of a head, a main body, a drive mechanism case, a tail peduncle and a tail fin. The PF-700 has two joints. One joint at which located between the body and the drive mechanism case is used for turning, and it is moved by a servomotor in the body. Another joint at which located between the drive mechanism case and the tail peduncle is used for propulsion, and it is moved by the D/C motor in the drive mechanism case.
R/C devices in the body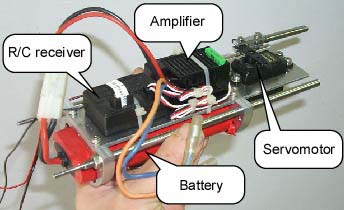 There are an R/C receiver, an amplifier for the D/C motor, a 7.2 V battery and the servomotor for the turning in the body. The construction is the same of an electric R/C car. The body is waterproofed with a rod seal (a lenear bearing) and "O" rings.
There are an R/C receiver, an amplifier for the D/C motor, a 7.2 V battery and the servomotor for the turning in the body. The construction is the same of an electric R/C car. The body is waterproofed with a rod seal (a lenear bearing) and "O" rings.
Drive mechanism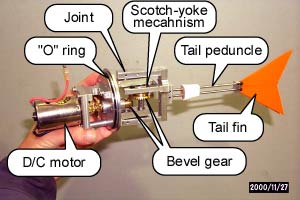 In the drive mechanism case, there are the D/C motor (Mabuchi RS-540) and four gears. The drive mechanism case is waterproofed by a rod seal (a lenear bearing) and "O" rings. A bevel gear is seting at the edge of rotating shaft taht is waterproofed by the rod seal. The rotating motion changes to the swing motion of the tail fin using a Scotch-yoke mechanism. The whole gear reduced ratio is 1/16.7, and the maximum frequency of the tail fin is about 10 Hz.
In the drive mechanism case, there are the D/C motor (Mabuchi RS-540) and four gears. The drive mechanism case is waterproofed by a rod seal (a lenear bearing) and "O" rings. A bevel gear is seting at the edge of rotating shaft taht is waterproofed by the rod seal. The rotating motion changes to the swing motion of the tail fin using a Scotch-yoke mechanism. The whole gear reduced ratio is 1/16.7, and the maximum frequency of the tail fin is about 10 Hz.
Swimming Performance of the PF-700 The PF-700 is controled by an R/C transmitter of 2 channels. One channel moves the servomotor for turning, and another channel controles the speed of the D/C motor for changing of the frequency. The PF-700 has no control device for up and down motion. In order to locate an antenna in the air, a float is seting at upper side of the body as shown in belows photograph. The float is too big. Because we will install some measuring devices on the float in the next step.
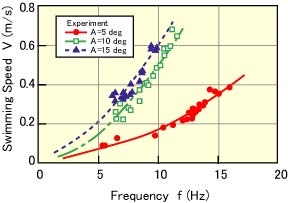
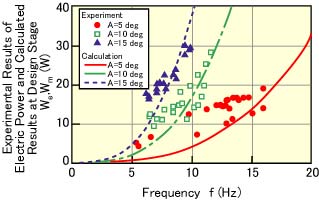
The PF-700 is controled by an R/C transmitter of 2 channels. One channel moves the servomotor for turning, and another channel controles the speed of the D/C motor for changing of the frequency. The PF-700 has no control device for up and down motion. In order to locate an antenna in the air, a float is seting at upper side of the body as shown in belows photograph. The float is too big. Because we will install some measuring devices on the float in the next step.The figures in belows show the experimental results of swimming speed and electric input, with changing of the amplitude, A of tail fin. It was confirmed that the PF-700 could swim the maximum speed of about 0.7 m/s at the frequency of about 12 Hz. Also, the measured electric input was compared with the calculated power of the design stage. So, we think that these results will be useful for the design of a fish robot in the next step.
  Developmental Diary of the PF-700 A Movie of the PF-700 (MPEG format, 1.8MB) [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |