PF-700開発日誌
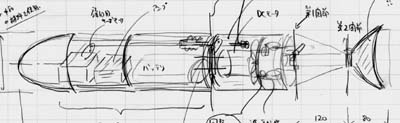
2000年6月,構想開始魚ロボットの高速化を目指して,新しい実験用魚ロボットPF-700の開発構想を始めました。尾ひれを高い周波数で往復させるため,直流モータを使用することにします。外形は,サンマを参考にして,細長い形状とします。右の図は初期のスケッチです。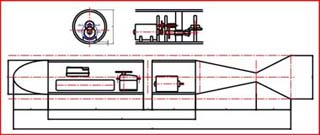
2000年8月,初期の図面この魚ロボットの開発は,杉浦君(東京電機大学の学生)の卒業研究として進めています。いよいよ図面を書き始めました。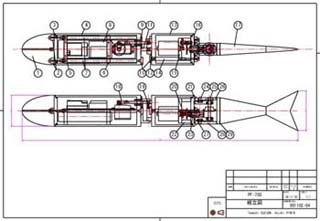
2000年10月,図面完成間近まずまず順調に進んでいます。組立図がほとんど完成してきました。しかし,細かい部品の検討が必要です。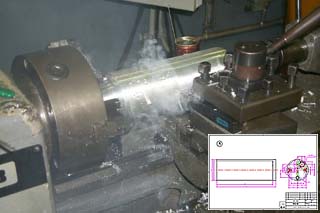
2000年11月10日,部品の製作開始部品の製作を始めました。右の写真は旋盤で胴体を製作しているところです。
2000年11月14日,フライス加工今日はフライス盤で板材の加工をしました。2000年11月16日,胴体の加工と機構部の組立今日も作業しました。長い胴体の加工には結構苦労しました(左写真)。機構部の組立もほぼ終了しました(右写真)。

 2000年11月17日,塗装と尾柄の製作胴体を塗装しました(左写真)。硬質発泡ウレタンで尾柄を作りました(右写真)。

 2000年11月21日,進水式防水をし,仮のフロートを取り付けた後,ついに進水式をしました。かなり調子いいです!この後,新しいフロートを製作し,いくつかの改良を行った後,実験を開始します。
 

 2000年11月22日,フロートの製作と試験運転新しいフロートを製作し,試験運転を行いました。尾ひれの根本部分の強度,旋回用関節の動きなどに問題があることがわかりました。今後,尾ひれの周波数や遊泳速度,消費電力などの測定を行う予定です。
 2000年11月30日,計測装置の製作尾ひれの周波数を測定するための光センサと直流モータの消費電力を測定するための基板を製作しました。それらを処理して,表示するためのマイクロコンピュータの基板とプログラムを作りました。後日,詳細について紹介します。


[ Power and Energy Engineering Division ] [ Hirata HOME ] [ SRI HOME ] |
| Contact khirata@nmri.go.jp |