| 実験用魚ロボット「PF-700」 2001/4/25更新 平田宏一 
実験用魚ロボット「PF-700」 高速遊泳を目指した実験用魚ロボットPF-700を紹介します。今までに試作したPF-600の実験結果から,尾ひれを高い周波数で振動させるほど,高い遊泳速度が得られることがわかりました。PF-700は,尾ひれを直流モータによって駆動することで,10 Hz程度の周波数で振動させることができます。外形はサンマを参考にし,細長い形状です。
高速遊泳を目指した実験用魚ロボットPF-700を紹介します。今までに試作したPF-600の実験結果から,尾ひれを高い周波数で振動させるほど,高い遊泳速度が得られることがわかりました。PF-700は,尾ひれを直流モータによって駆動することで,10 Hz程度の周波数で振動させることができます。外形はサンマを参考にし,細長い形状です。

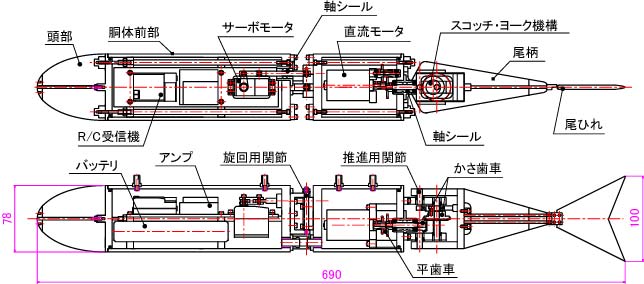
PF-700の構造PF-700の全長は約700 mm,胴体の直径は約80 mmです。PF-700は,頭部,胴体,駆動機構部,尾柄および尾ひれから構成されていて,2つの関節が取り付けられています。胴体と駆動機構部の間の関節は,サーボモータで動かされる旋回用の関節です。駆動機構部と尾柄の間の関節は,直流モータで動かされる推進用の関節です。
胴体内部のR/C装置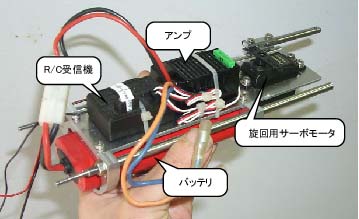 胴体内部には,R/C受信機,直流モータ駆動用のアンプ,7.2 Vバッテリおよびサーボモータが配置されています。これらの構成は電動ラジコンカーと同じです。胴体はロッドシール(直動軸受を流用)とOリングで水密構造となっています。
胴体内部には,R/C受信機,直流モータ駆動用のアンプ,7.2 Vバッテリおよびサーボモータが配置されています。これらの構成は電動ラジコンカーと同じです。胴体はロッドシール(直動軸受を流用)とOリングで水密構造となっています。
駆動機構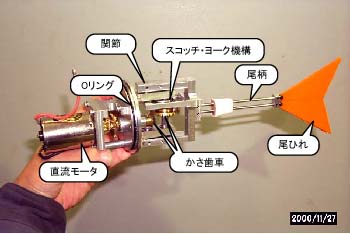 駆動機構部のケースの内部には,直流モータ(マブチRS-540)と4つの歯車が配置されています。ケースはロッドシール(直動軸受を流用)とOリングで密封されています。シールされている回転軸の一端には,かさ歯車が取り付けられています。回転運動は,スコッチヨーク機構によって尾ひれの往復運動に変換されます。全ての歯車による減速比は約1/16.7であり,尾ひれの最高周波数は約10 Hzに設定してあります。
駆動機構部のケースの内部には,直流モータ(マブチRS-540)と4つの歯車が配置されています。ケースはロッドシール(直動軸受を流用)とOリングで密封されています。シールされている回転軸の一端には,かさ歯車が取り付けられています。回転運動は,スコッチヨーク機構によって尾ひれの往復運動に変換されます。全ての歯車による減速比は約1/16.7であり,尾ひれの最高周波数は約10 Hzに設定してあります。
PF-700の運転結果 PF-700は市販の2チャンネルのラジコン送信機で操縦できます。1つのチャンネルは旋回用のサーボモータを動かし,もう1つのチャンネルはモータの回転数(尾ひれの周波数)を制御します。そして,アンテナを空中に出す必要があるため,運転時にはフロートを取り付けます。フロートの内部にはマイクロコンピュータや測定機器を取り付けるため,かなり大型になっています。
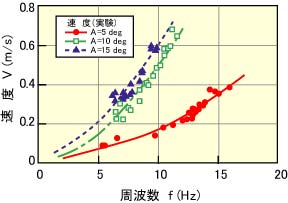
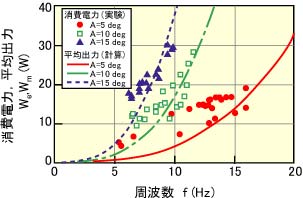
PF-700は市販の2チャンネルのラジコン送信機で操縦できます。1つのチャンネルは旋回用のサーボモータを動かし,もう1つのチャンネルはモータの回転数(尾ひれの周波数)を制御します。そして,アンテナを空中に出す必要があるため,運転時にはフロートを取り付けます。フロートの内部にはマイクロコンピュータや測定機器を取り付けるため,かなり大型になっています。下の図は,尾ひれの振幅Aを3通りに変化させた場合の遊泳速度と消費電力を測定した結果です。尾ひれを約12 Hzの周波数で振動させることで,最高約0.7 m/sの速度で泳ぐことが確認できました。また,消費電力においては,設計出力の計算結果と比較していますので,これから開発する魚ロボットの設計に役立つものと考えています。
  PF-700開発日誌 PF-700のムービー(MPEG形式,1.8MB) [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |