|
|
Development Diary of the UPF-2001
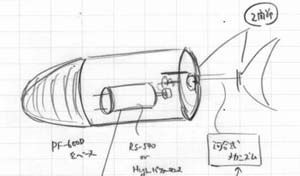
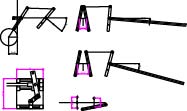
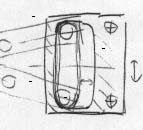
May 2001: ConceptionWe start to develop a new fish robot. It is based on the PF-600, and aims to get higher swimming speed. The figure to the right is an early sketch.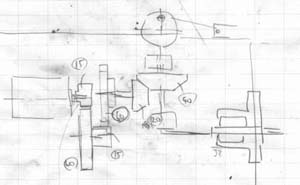
June 1, 2001: Conception of the Drive MechanismWe duscuss about the drive mechanism with a D/C motor.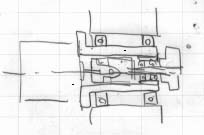
June 2, 2001: Measure the Drive Torque?We also consider the measuring method of the D/C motor.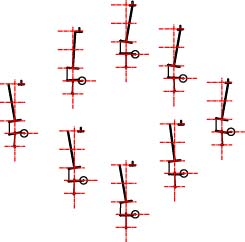
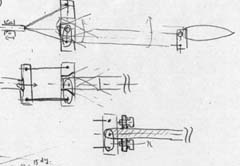
June 12, 2001: Structure of the TailWe duscuss about the structure of the tail mechanism.June 28, 2001: Structure of the TailWe also duscuss about the structure of the tail mechanism.

July 1, 2001: Conception of the Unit-typeWe consider the Unit-type fish robot, which is consist on the separated units.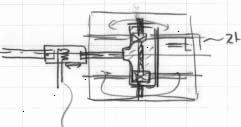
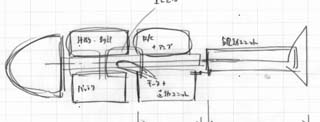
July 6, 2001: Conception of the TailWe duscuss about the structure of the tail mechanism. The figure to the right shows its sketch.July 10, 2001: Conception of the TailWe have been discussing the structure of the tail mechanism ever since.
August 7, 2001: FeatureAt last, the whole feature is imagined well.
August 10, 2001: Make PartsWe make the parts of the tail mechanism.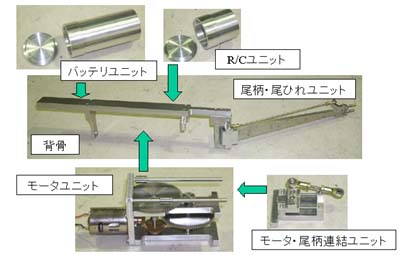
September 11, 2001: Make PartsWe make the parts of several units. Sorry, Japanese picture.
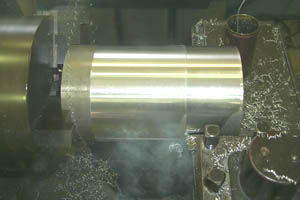
October 22, 2001: Make PartsA lot of parts are completed.October 25, 2001: Make PartsWe are making a cover of a power unit and a part of a Scotch-yoke mechanism.
 
November 1, 2001: Power Unit in the WaterWe tried to work the power unit in the water. We could not confirm any water leakage.November 7, 2001: Stream-lined BodyIn order to decide the body, we made three kinds of stream-lined models.

 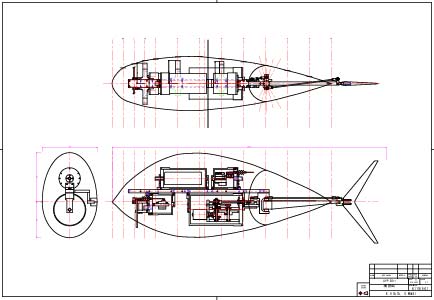
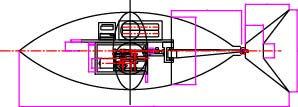
November 9, 2001: Overall StructureWe are discussing the overall structure on the CAD.

November 30, 2001: Building a BodyIt is the final stage. We are building the body.

December 4, 2001: Building a BodyThe wood frame of the body is completed.
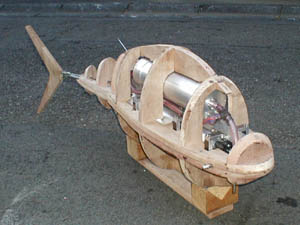
December 10, 2001: Building the BodyThe wood frame is completed.December 11, 2001: Building of floatsWe make floats with consideration of the balance. They are used for FRP patterens.

 
December 12, 2001: Building of a FRP bodyWe are building the FRP body.
December 18, 2001: The body shavingWe are shaving the surface of the body earnestly.
December 20, 2001: PaintingWe are painting the body. It is the final stage of this development.December 21, 2001: Launching ceremonyToday is the launching ceremony finally. The UPF-2001 started to swim well as shown in the photograph to the left. However, after a few minutes, bearings was broken into pieces as shown in the photograph to the right. It is too lacked strength.

 
December 25, 2001: Lacked strengthWe had tried to swim the UPF-2001. Up to now, three bearings and two rods were broken.December 26, 2001: Adjustment of buoyancyWe adjust the float in a small water tank. And we make several mechanical parts to get enough strength.

 January 7, 2002: Measuring of swiming speedThe swiming speed of the U=P-2001 is measured in a water tank whch has 25 m of length, 10 m of width and 2 to 5 m depth.

 [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |