|
|
UPF-2001開発日誌
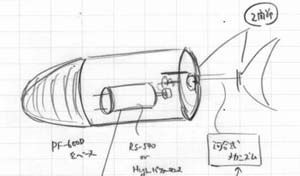
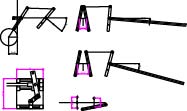
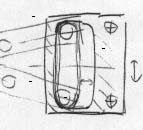
2001年5月,構想開始本年度に試作する魚ロボットの構想を始めました。PF-600をベースとして,高速化を図ることを検討しています。右の図は初期のスケッチです。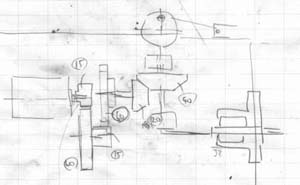
2001年6月1日,減速機構の構想直流モータの減速機構を考えています。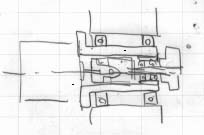
2001年6月2日,駆動トルクの測定?直流モータの駆動トルクを測定する方法なども考えています。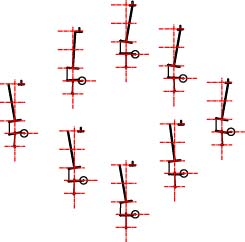
2001年6月12日,尾部の構造尾部の構造を考えています。2001年6月28日,尾部の構造引き続き,尾部の構造を考えています。

 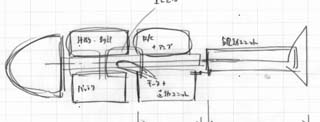
2001年7月1日,ユニット式の構想以前から構想があったユニット式魚ロボットを検討しています。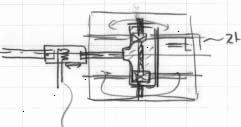
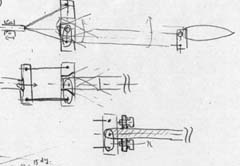
2001年7月6日,尾部の構想尾部の直動機構を考えています。右図はスケッチです。2001年7月10日,尾部の構想引き続き,尾部の構造を考えています。
 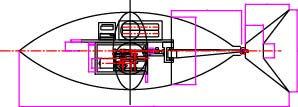
2001年8月7日,全体図いよいよ全体構造が見えてきました。
2001年8月10日,部品製作尾部駆動ユニットの部品を作りました。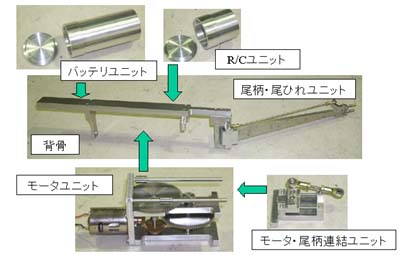
2001年9月11日,部品製作いくつかのユニットの部品が完成しています。
2001年10月22日,部品製作かなりの部品が完成してきました。2001年10月25日,部品製作パワーユニットのカバーやスコッチヨーク機構の部品を製作しています。
 
2001年11月1日,水の中へパワーユニットを水中で動かしました。水漏れは確認されませんでした。2001年11月7日,流線形モデルの製作胴体形状を検討するため,3種類の流線形モデルを製作しました。

 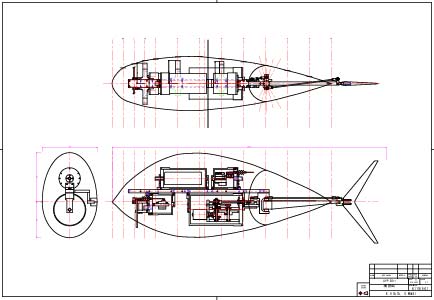
2001年11月9日,全体構造CAD上で全体の構造を検討しています。
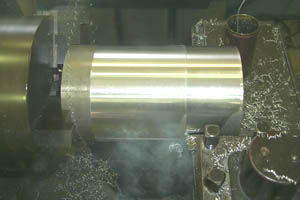
2001年11月30日,胴体の製作いよいよ最終段階です。胴体を製作しています。
2001年12月4日,胴体の製作木製の枠がほとんど完成しました。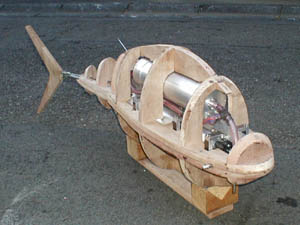
2001年12月10日,胴体の製作木製の枠が完成しました。2001年12月11日,フロートの製作水中でのバランスを見ながら,ウレタン製のフロートを作りました。これはFRPの型としても使います。

 
2001年12月12日,FRPの製作FRP製の胴体を製作しました。
2001年12月18日,胴体の整形FRP製の胴体をひたすら削っています。
2001年12月20日,胴体の塗装胴体に色を塗っています。2001年12月21日,進水式ようやく進水式です。最初のうちは順調に泳ぎました(左写真)。ところが,数分後,ベアリングが破損してしまいました(右写真)。強度不足です。

 
2001年12月25日,強度不足何度か泳がせました。これまでに,3個のベアリングと2本の軸を破損しました。2001年12月26日,バランス調整小型の水槽でバランスを調整しています。さらに,強度アップのため,いくつかの部品を製作しています。

 2002年1月7日,遊泳速度の測定長さ25 m,幅10 m,深さ2〜5m程度の水槽で遊泳速度を測定しました。

 [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |