| Prototype Fish Robot, UPF-2001 Koichi Hirata and Syusuke Kawai, November 9, 2001 
 High-performance and Multi-purpose-used Fish Robot
High-performance and Multi-purpose-used Fish RobotWe try to develop a high-performance and multi-purpose-used fish robot. The high-performance fish robot means a good swimmer like a real fish. To get the high-performance, we adopt the simple and unique mechanism for tail movement. The multi-purpose-used fish robot means that it can do various missions in the sea. So, we try to develop the unit-type fish robot, which consists of several components like a power unit and a control system unit.
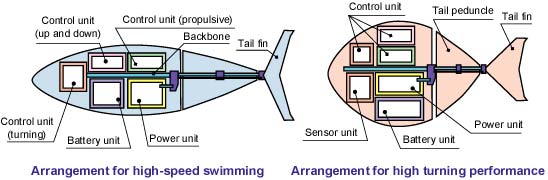
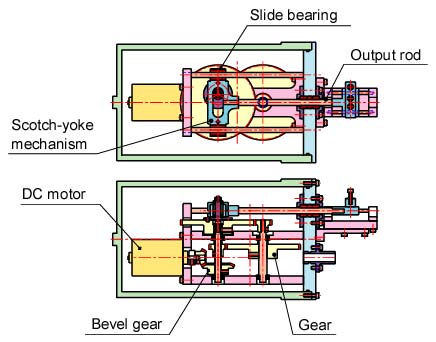
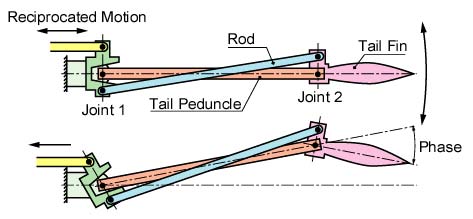
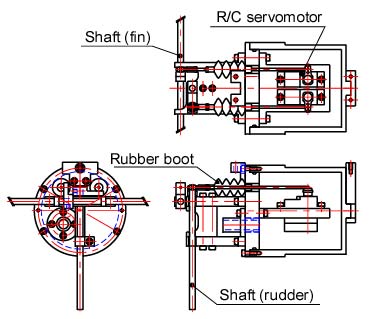
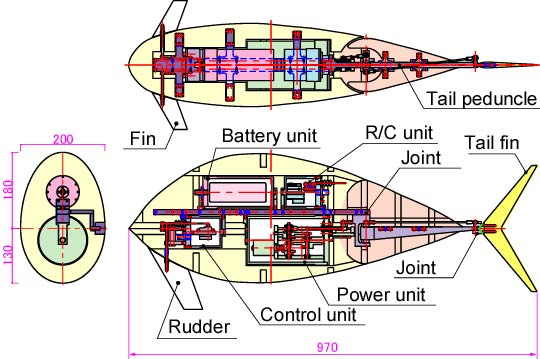
Basic Structure of the UPF-2001The fish robot named UPF-2001 aims to get high-performance and multi-purpose-used. It has about 1 m of body length. The belows figure shows the basic structure of the UPF-2001. It consits of a power unit including a D/C motor, gears and reciprocating motion mechanism, a battery unit, a R/C unit including a receiver and an amplifier for the motor, a control unit for turning and up-down motion, and a tail unit with the unique mechanism.
Outline of Principal Units
Swiming Speed of the UPF-2001
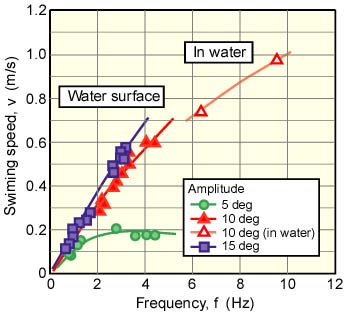
The figure to the right shows the measured result of the swiming speed. When the UPF-2001 swims on the water surface, the body exposes about 20 mm from the water surface, the swiming speed increases with increasing of the frequency. When the UPF-2001 swims in water, the maximam speed is 0.97 m/s. It is very higher than that of previous our fish robots. We think that the UPF-2001 can get more higher speed after adjustment of the size and shape of the tail fin.
  Development Diary of the UPF-2001 (updating)Detail Information of Power UnitMovement of the Tail Fin (underconstructing)Hydrodynamic Performance of Stream-lined BodyShape of the Tail Fin (underconstructing)Control System (underconstructing)CAD data of the UPF-2001Movies of the UPF-2001 Development Diary of the UPF-2001 (updating)Detail Information of Power UnitMovement of the Tail Fin (underconstructing)Hydrodynamic Performance of Stream-lined BodyShape of the Tail Fin (underconstructing)Control System (underconstructing)CAD data of the UPF-2001Movies of the UPF-2001[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] | |
| Contact khirata@nmri.go.jp |