|
|
|
魚ロボットの推進方法 2001/2/6 平田宏一 
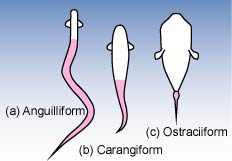 実際の魚は多種多様な泳ぎをしていますが,全ての魚に共通して言えることは,水を後方に押し出して推進しているということです。最も代表的な魚の泳法の分類として,米国の動物学者Brederは,尾ひれの長さと運動の程度でウナギ形,アジ形,ハコフグ形の3種類に大別しました(右図参照)。ウナギ形は細長い体全体をくねらせて泳ぐ推進方法です。アジ形は尾ひれと体の後半部を使用して泳ぐ方法で,マス,コイ,カツオおよびマグロなどの高速魚がこれに分類されます。ハコフグ形は体をほとんど使わずに尾ひれだけを動かして泳ぐ推進方法です。
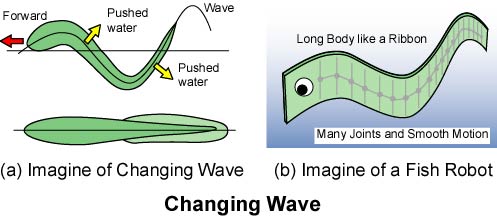
実際の魚は多種多様な泳ぎをしていますが,全ての魚に共通して言えることは,水を後方に押し出して推進しているということです。最も代表的な魚の泳法の分類として,米国の動物学者Brederは,尾ひれの長さと運動の程度でウナギ形,アジ形,ハコフグ形の3種類に大別しました(右図参照)。ウナギ形は細長い体全体をくねらせて泳ぐ推進方法です。アジ形は尾ひれと体の後半部を使用して泳ぐ方法で,マス,コイ,カツオおよびマグロなどの高速魚がこれに分類されます。ハコフグ形は体をほとんど使わずに尾ひれだけを動かして泳ぐ推進方法です。一方,多くの研究者によって,変形波による推進,細長体理論及び振動翼理論等の魚の推進原理あるいは解析法が紹介されています。 このページでは,これらの分類や推進原理を参考にし,さらに魚ロボットの設計・開発することに着目して,(a) 変形波による推進,(b) 体全体を利用する推進,(c) 振動翼による推進,(d) 振動板による推進の4種類の分類を提案しています。 (a) 変形波による推進 下図は細長い体に変形波を送る推進方法であり,波の伝播を利用して推進しています。推進力を得るためには,変形波の速度が前進速度よりも大きく,振幅を尾に向かって増加する必要があります。変形波による推進は,波の向きを急激に変化させることができ,前後の動き,すなわち細かい位置制御が容易であるという特徴があります。この推進方法を利用した魚ロボットは,多関節による体全体の滑らかな運動が必要とされ,それぞれの関節の制御はかなり複雑になります。しかし,適切で高度な制御を実現できれば,巧みな位置制御を必要とするような狭い水域での海中作業などに利用できると考えられます。
  (b) 体全体を利用する推進
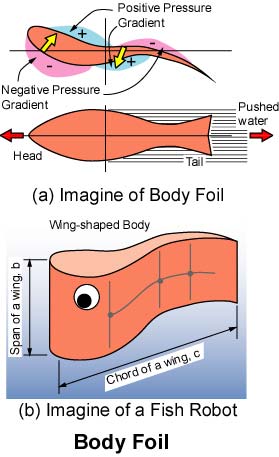
(b) 体全体を利用する推進右図に示す推進方法は,尾ひれの運動と体全体の運動の両方を利用し,水を後方に押し出して推進します。右図(a)は体全体の運動による圧力分布を模式的に表したものです。このように体全体の表面に正圧域および負圧域(あるいは作用・反作用の力)が存在し,それらの合力が前進方向の推進力となります。また,右図(b)に示すように,体全体を1枚の翼と見なし,翼の性能を評価する指標としてよく使われるアスペクト比(=翼幅b/翼弦c)に着目することで,この推進方法の特徴を考察できます。体全体を1枚の翼と見なした場合,そのアスペクト比はかなり低くなります。ジャンボジェット機の主翼などに使われている低いアスペクト比の翼は,周囲の流体の速度や迎角(流れの方向に対する翼の傾き)に対して安定した性能が得られるため,使用範囲が広いと言えます。また,低いアスペクト比の翼は翼面積あたりの抵抗が大きいため,高速・高効率推進には適していないものの,魚ロボット全体に対する翼面積が大きいことから大きい推進力を期待できます。すなわち,静止時からの加速性に優れた魚ロボットが実現できると考えられます。また,推進力の方向を任意に操作することで高い旋回性能を期待できること,動力源の出力を体全体の運動に分散できるため集中荷重が生じにくいことも魚ロボットの利点としてあげられます。 実際の魚としては,サケやマスがこの推進方法に分類されます。これらの魚は一般に三角形の尾ひれをしています。そして,尾ひれを左右に振動させることによって,後述する「振動翼による推進」と同様の原理で推進力が得られていると考えられます。三角形尾ひれのアスペクト比が「振動翼による推進」の三日月形尾ひれのアスペクト比よりも低いことは流体力学的な観点からとても興味深いものです。 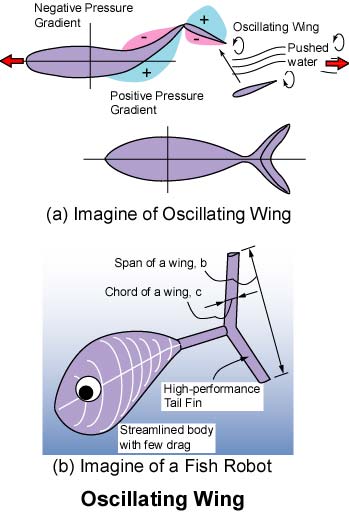 (c) 振動翼による推進
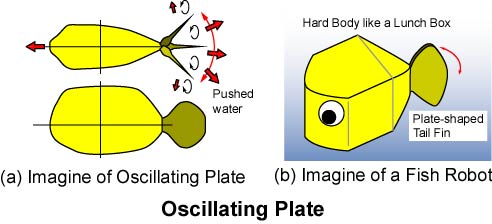
(c) 振動翼による推進右図に示す振動翼による推進において,大部分の推進力は,単独の翼と見なされる尾ひれを振動させることで生じる揚力であると考えられます。振動翼の運動は,尾ひれの平行運動(ヒーヴィング運動)と回転運動(フェザリング運動)とを重ね合わせたものであると見なせ,マグロやカツオ等の実際の魚ではこれらに90 deg程度の位相差を与えています。これらの魚の尾ひれは,三日月形をしていて,翼幅bが大きく翼弦cが小さい,すなわち高いアスペクト比の尾ひれを持っています。ヘリコプタのロータ等に使われている高いアスペクト比の翼は,翼面積あたりの抵抗が小さく,揚力(推進力に相当)が大きいという特徴があります。すなわち,高い流体力学的特性を持つ尾ひれと抵抗が少ない流線型の胴体および尾柄とを組み合わせることで,この推進方法の優れた特徴が活かされます。抵抗が少ない胴体と尾ひれによって魚ロボットの高速遊泳が可能となります。そして,魚ロボット全体から見ると翼面積は小さいため,尾ひれを駆動するエネルギを相対的に小さくでき,高効率推進が可能となります。しかし,体全体に対する推進力が小さいため静止時からの高い加速性能が期待できないこと,駆動力が尾ひれ付け根の関節に集中するためその強度設計が重要になること等の課題があります。 (d) 振動板による推進 下図に示す振動板による推進は,体をほとんど使わずに板状の尾ひれだけを動かして推進する方法です。この方法は,尾ひれの運動により押し出される水の向きが左右方向に分散されやすいという特徴があります。すなわち,後向きの一様な水の押し出しが難しいため,上記の推進方法と比べて,速度および推進効率の点で劣っていると考えられます。しかし,この推進方法は,関節が少ないことから駆動部での機械損失を小さくでき,機械効率の点で有利であると言えます。そして,機構が簡単にできることから小型の魚ロボットに適した推進方法であると考えられます。なお,この推進方法の性能向上策として,板状の尾ひれに適切な弾性を持たせることで,押し出す水の向きを安定させやすいと考えられます。
 以上の推進方法の分類は,魚ロボットの機械設計という観点から行っているため,実際の魚の泳法や厳密な流体力学には必ずしも対応したものではありません。しかし,このような分類を考えることで,魚ロボットにおける設計上の留意点を検討することができると考えられます。 |
|
[Outline of the Fish Robot] [Fish Robot Home Page] [ Hirata HOME ] [ Power and Energy Engineering Division ] [ NMRI HOME ] |
|
|
| Contact: Koichi Hirata (khirata@nmri.go.jp) |