|
|
魚ロボットの概要
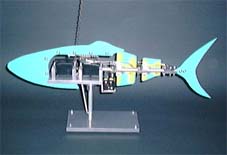 海中ロボットは,海洋開発や海洋環境保全においてとても重要であり,その開発が盛んに行われています。そして,さらに高効率で高性能な海中ロボットが必要とされています。私たちは,魚の泳法を模擬し,魚と同等の運動性能を有する自律形海中ロボット(魚ロボット)の開発を目指して,1999年より魚ロボットの研究を進めています。
海中ロボットは,海洋開発や海洋環境保全においてとても重要であり,その開発が盛んに行われています。そして,さらに高効率で高性能な海中ロボットが必要とされています。私たちは,魚の泳法を模擬し,魚と同等の運動性能を有する自律形海中ロボット(魚ロボット)の開発を目指して,1999年より魚ロボットの研究を進めています。実際の魚の泳法は実に様々です。例えば,エイは体を波打たせて泳ぎ,カレイやヒラメは長いひれを波打たせて泳ぎます。本研究では,ニジマスやマグロのように,尾ひれを左右に振りながら泳ぐ魚の泳法を対象としています。  魚ロボットの推進原理
魚ロボットの推進原理魚ロボットの推進原理を紹介しています。
|
|
[Fish Robot Home Page] [ Hirata HOME ] [ Environment and Energy Department ] [ NMRI HOME ] |
|
|
| このページに関するお問い合わせはkhirata@nmri.go.jpまでお願いします |