|
|
|
Turning Modes for a Fish Robot February 3, 2001 by Koichi Hirata 
Though real fish turn skillfully using not only tail fin but also pectoral fins or ventral fins, we determined a structure of a fish robot, which turns with only swing of tail fin. As the tail fin is utilized both propulsion and turning, the fish robot gets simple structure and easy control for swimming. In the case of turning with only swing of tail fin, we think that there are three turning modes shown as follows.
In this turning mode, a head and a body of the fish robot are equivalent to a rudder, and the tail peduncle and the tail fin are equivalent to a screw propeller of the ship. If we attend to the resemblance of these functions, we can analyze this mode and control the robot easily.
In Mode B, as the stationary posture of the fish robot with the leaning of the tail is regarded as a wing, its friction force and lift force can be estimated. It is possible to analyze the turning performance and control the movement by considering the kinetic energy at the straight propulsion.
|
|
[Outline of the Fish Robot] [Fish Robot Home Page] [ Hirata HOME ] [ Power and Energy Engineering Division ] [ NMRI HOME ] |
|
|
| Contact: Koichi Hirata (khirata@nmri.go.jp) |
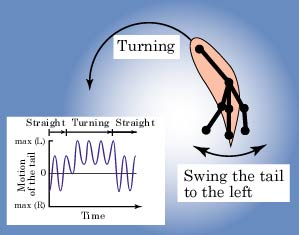 Turning Mode A
Turning Mode A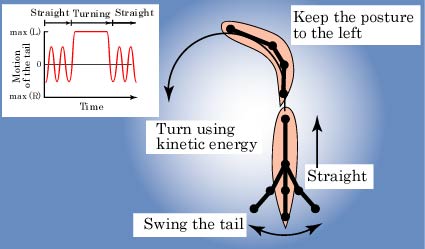 Turning Mode B
Turning Mode B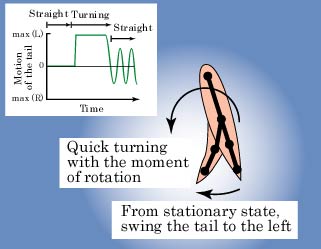 Turning Mode C
Turning Mode C