|
|
Outline of the Fish Robot
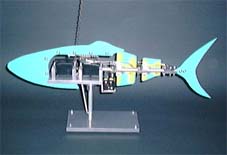 Underwater robots are widely used in the fields of ocean development, ocean investigation, and marine environmental protection. Requests for underwater operations to be carried out more efficiently have become pressing. In response, autonomous underwater robots have been planed. In fact several test robots have already been developed. The need for higher efficiency and propulsive performance essentially requires fish-like performance.
Underwater robots are widely used in the fields of ocean development, ocean investigation, and marine environmental protection. Requests for underwater operations to be carried out more efficiently have become pressing. In response, autonomous underwater robots have been planed. In fact several test robots have already been developed. The need for higher efficiency and propulsive performance essentially requires fish-like performance.We have long been interested in the highly efficient propulsion of fish. We have attempted to apply it to underwater robots for fish-like swimming mechanisms such as the one pictured. In order to develop high-performance, intelligent underwater robots, a fish robotics study was undertaken in 1999 at the Ship Research Institute, part of the Japan Ministry of Transportation in Tokyo Japan. Swimming methods of fish are various and interesting; they have many specialized modes of movement. For example, an eel swims waving the whole of its body and is highly adapted to an enclosed environment. A flat fish, on the other hand, swims by waving long fins in special patterns, allowing it to hover, backup or turn quickly in any direction. In our study, we focus the focus on fish such as the pike or tuna --- fast and efficient swimmers. These fish accelerate with amazing quickness, turn easily, and attain dizzying speed all while expending very little energy. These kinds of fish move by coordinated side-to-side motion of their tail fin and tail peduncle, the part of the body just forward of the tail fin.
 Principles of the Swimming Fish Robot
Principles of the Swimming Fish RobotA simple explanation of the principles of swimming fish robot.
|
|
[Fish Robot Home Page] [ Hirata HOME ] [ Environment and Energy Department ] [ NMRI HOME ] |
|
|
| Contact khirata@nmri.go.jp |