魚ロボットの旋回方法
2001/2/3 平田宏一

実際の魚は,胸ひれや腹ひれを巧みに利用し,旋回しています。本研究で開発を進めている魚ロボットは,運動制御を簡略化するために,胸ひれや腹ひれの運動を利用しない構造を対象としています。魚ロボットが尾柄及び尾ひれの運動だけを利用して旋回する場合,次の3種類の旋回方法に分類できると考えました。
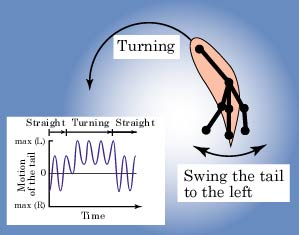 モードA
モードA
モードAは,尾柄及び尾ひれの運動を左右どちらかに偏らせて運動させる旋回方法です。これは,尾柄及び尾ひれが推力を発生させながら,魚ロボットの頭部及び胴部が船舶における方向舵と同様の働きをすると考えられます。このように,推進と方向舵の2つの作用を考慮することで,旋回性能の解析や旋回角度の制御が比較的容易に可能であると考えられます。
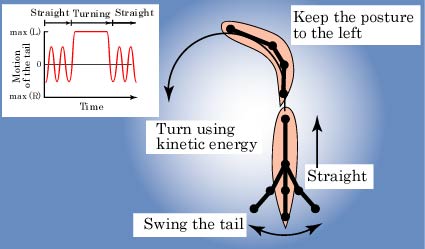 モードB
モードB
モードBは,魚ロボットを直進運動させた状態から,尾柄及び尾ひれを左右のどちらかに偏らせた状態で運動を停止させて旋回をさせる方法です。この直進運動の慣性力を利用した方法は,上述した尾柄及び尾ひれを左右に偏らせながら運動させる方法より,旋回直径を小さくできると考えられます。また,静止状態の魚ロボットの体形を1枚の翼とみなすことで,その揚力及び抗力を概算し,さらに直進運動時の慣性エネルギ(速度)の兼ね合いを考慮することで解析及び制御が可能であると考えられます。
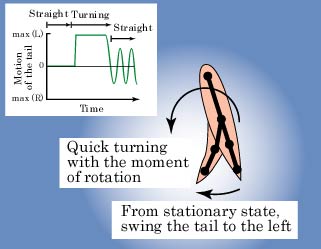 モードC
モードC
モードCは,魚ロボットを静止させた状態から,尾柄及び尾ひれを左右のどちらか一方に勢いよく運動させて旋回する方法です。これは,主として運動部の慣性力及び抗力を利用し,重心周りの回転モーメントを発生させる方法です。静止時からの旋回が可能であり,旋回直径を最も小さくできると考えられます。しかし,旋回角度の制御が困難であり,瞬時に旋回させるためには,尾柄及び尾ひれを駆動させるための十分なトルクを有する動力源が必要となります。したがって,魚ロボットに使用する動力源のトルク及び運動速度等を十分に考慮する必要があると考えられます。
以上の3種類の他にも,これらを組み合わせた方法などが考えられますが,旋回方法をこのように分類することで,魚ロボットの基本的な旋回性能を概ね把握できるものと考えています。
|