Up-down Motion for a Fish Robot
February 3, 2001 by Koichi Hirata

In order to develop a fish robot for undewater application, it is needed that the fish robot has a 3-D motion of which consist forward, turning and up-down motion. We consider how to move a fish robot up or down in this page. As the up-down motion mechanism, we suggest five kinds of the mechanisms in follows.
 Up-down Mode A
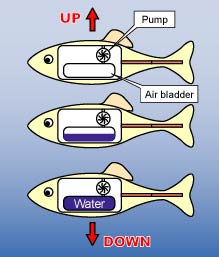
Up-down Mode A
In the Mode A, a water tank (air bladder) and a pump are located in a fish robot. A balance of gravitation and buoyancy is changed by water in and out of the tank. After all, when the tank fills water, the gravitation becomes bigger than the buoyancy, then the fish robot moves down. When the tank fills air, the buoyancy becomes bigger than the gravitation, then the fish robot moves up. In this mode, the fish robot can move up and down vertically, and be controlled depth certainly and accurately. However, it is considered that this mode has problems such as delay of a response, handling of compressed air and getting large size by the tank and the pump.
 Up-down Mode B
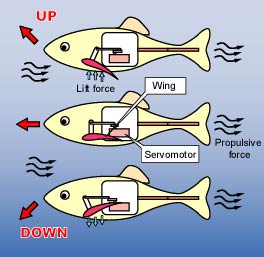
Up-down Mode B
In the Mode B, a fish robot with fins (wings) moves up and down using their lift force. It is considered that the fish robot can realize various motions by location and operation of the fins like the main wings or horizontal wing of an airplane. It also is expected quick response and high dynamic performance in higher range of swimming speed. However, the fish robot is needed the higher swimming speed, because it utilizes the lift force of the fins. Thus it is not suitable for delicate control.
 Up-down Mode C
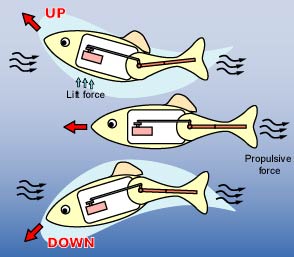
Up-down Mode C
In the Mode C, a fish robot has a mechanism for changing angle of up and down direction at its head or tail. The fish robot changes its body to a shape of a wing, and moves up and down by the lift force. It is expected quick response and high dynamic performance in higher range of swimming speed alike the Mode B. But the fish robot is needed the higher swimming speed, because it utilizes the lift force.
 Up-down Mode D
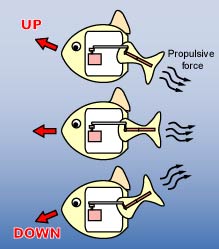
Up-down Mode D
In the Mode D, a fish robot moves up and down with changing a direction of tail fin which generates propulsive force. The fish robot has a mechanism for changing angle of up and down direction at its tail alike the Mode C. However the lift force of the body is not generated. It is considered that this mode can be used the fish robot which has a thin width of the body.
 Up-down Mode E
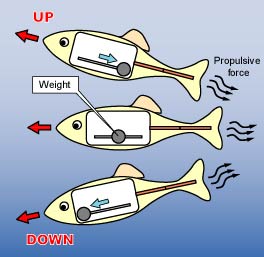
Up-down Mode E
In the Mode E, a fish robot has a mechanism moving a weight to forward and back direction. The fish robot moves up and down with changing a pitching direction by the moving of the weight. The mechanism is only set inside of the body, then the fish robot has a simple structure in a viewpoint of a seal device and mechanics. However, it is not expected quick response. And it is considered that an adjustment of gravitation and buoyancy is important for the suitable up -down motion.
On the other hand, in the case of changing a weight to the left and the right, the turning to the left and the right means the up -down motion. Namely, the fish robot utilizes a rolling motion and turning motion. But it is considered that the big rolling motion is not suitable in a viewpoint of the application and structure of the fish robot.
In order to get a practical used up-down motion for a fish robot, it is needed to combine the above modes. However, I have tried to estimate above five modes respectively with several fish robots, because we would like to understand characteristics of each mode adequately. I am thinking and discussing the detailed structure concretely.
On the other hand, when a fish robot moves in water, an radio control can not be used to the operation. Then it is important to discuss the adoption of other control system like supersonic waves, or the carrying of a microcomputer for the autonomous operation. I wonder that a development of the autonomous fish robot is suitable before the confirmation of the up-down motion.
|