魚ロボットの上下運動
2001/2/3 平田宏一

海中作業用の魚ロボットを開発するためには,3次元運動(前進方向,左右方向,上下方向)が必要となります。ここでは,魚ロボットを上下運動させる方法について考えます。魚ロボットにおける上下運動の方法として,浮き袋を利用する方法,フィン(翼)や体全体の揚力を利用する方法,重心位置を移動する方法に分類しました。
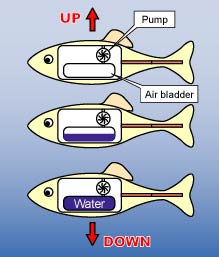 モードA:浮き袋を利用する方法
モードA:浮き袋を利用する方法
魚ロボットにタンクとポンプを搭載し,タンク内に水を流入・流出させることで重力と浮力のバランスを変化させます。すなわち,タンク内に水が満たされている場合は浮力よりも重力が上回り魚ロボットは降下し,タンク内に空気が満たされている場合は重力よりも浮力が上回り魚ロボットは上昇します。この方法は,垂直運動が可能であり,最も確実で正確な深度調整(制御)ができると考えられます。しかし,ポンプ能力の制限による応答性の遅さ,圧縮空気の保守,タンクとポンプを搭載することによる魚ロボットの大型化などの問題が生じると考えられます。
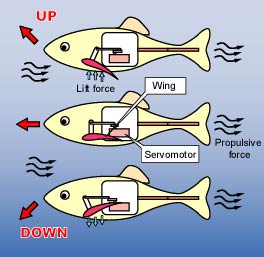 モードB:フィンによる揚力を利用する方法
モードB:フィンによる揚力を利用する方法
魚ロボットにフィン(翼)を取り付け,その揚力を利用して上下運動を行う方法です。航空機の主翼や水平尾翼と同様,フィンを取り付ける位置や操作によって,多様な運動を実現できると考えられます。しかも,高速遊泳時においては早い応答性と高い運動特性が期待できます。しかし,フィンの揚力を利用するため,ある程度以上の遊泳速度が必要であり,細かい位置制御には適していないと考えらます。
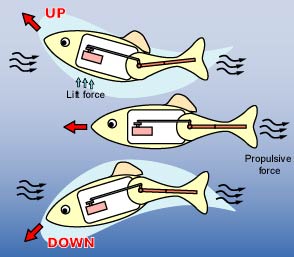 モードC:体全体の揚力を利用する方法
モードC:体全体の揚力を利用する方法
この方法は,尾部または頭部に上下方向の角度をつける機構を取り付け,魚ロボットの体全体を翼の形状に変化させて,その揚力によって上昇または下降する方法です。フィンによる揚力を利用する方法と同様,高速遊泳時においては早い応答性と高い運動特性が期待できますが,上下運動を適切に機能させるためには十分な遊泳速度が必要になると考えられます。
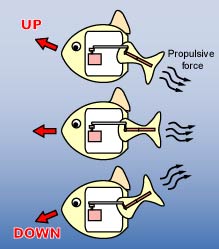 モードD:推進力の方向を変化させる方法
モードD:推進力の方向を変化させる方法
この方法は,推進力を発生する尾部の方向を変化せることで上下運動を行います。体全体の揚力を利用する方法と同様,尾部に上下方向の角度をつける機構を取り付けますが,体全体の揚力は発生させません。魚ロボットの横幅が薄い場合に利用できると考えられます。
 モードE:重心を移動させる方法
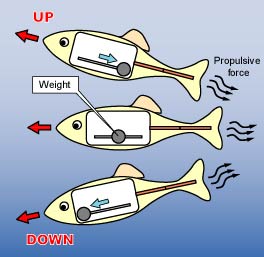
モードE:重心を移動させる方法
魚ロボット内部のおもりを前後に移動させることで,魚ロボットの体勢を変化させ,尾ひれの推進力によって上昇または下降します。重心移動の装置は魚ロボットの内部だけに配置できるので,水密シールや機構の面から最も簡単な上下運動の方法であると考えられます。しかし,早い応答性は期待できず,適切な上下運動のためには重力と浮力の適切なバランスが重要になると考えられます。
また,魚ロボット内部のおもりを左右に移動させることで,魚ロボットの体勢を回転(ローリング)させ,尾ひれの旋回力によって上昇または下降する方法も考えられます。しかし,魚ロボットを大きくローリングさせることは,魚ロボットの用途や構造によって問題が生じることがあると考えられます。
より実用的な上下運動を実現するためには上記の数通りの方法を組み合わせることが必要となると考えらえます。しかし,それぞれの方法の特徴を的確に把握するため,上記の5通りの方法を実験用魚ロボットにより評価したいと考えています。それぞれの方法における具体的な構造や何種類の魚ロボットを製作するかは現在検討しています。
一方,魚ロボットを水中で運動させる場合,無線(ラジコン)による操作ができなくなるため,超音波等の別の通信手段を採用するか,あるいは自律運転のためのマイクロコンピュータを搭載するかなどの検討が必要です。上下運動の動作確認をするための魚ロボットを開発する前に,魚ロボットの自律化を進める方が得策であるとも考えています。
|