Model Fish Robot, PPF-03
Updated on December 29, 1998 by Koichi Hirata

Model Fish Robot, PPF-03 (290 mm body length, 380 g weight) uses a small rotated D/C motor reduced speed about 1/50. The motor drives a tail peduncle and a tail fin with 90 degrees phase angle. The motor and electric battery are waterproofed by a lunch box (using a cooking goods). Thus, this fish robot can swim in the water.
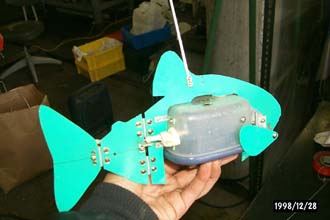 The left photograph is an appearance of the PPF-03. Targets of the manufacturing the PPF-03 are;
The left photograph is an appearance of the PPF-03. Targets of the manufacturing the PPF-03 are;
(1) Confirmation of the moving in the water,
(2) Discussion of the problems caused by the rotated motor,
(3) Confirmation of the turning performance.
 The PPF-03 is swimming in the water. The torque is not enough, because the reduced ratio is not suitable. The swimming speed, 0.2 m/s is confirmed with about 4 Hz frequency of the tail swing.
The PPF-03 is swimming in the water. The torque is not enough, because the reduced ratio is not suitable. The swimming speed, 0.2 m/s is confirmed with about 4 Hz frequency of the tail swing.
 The mechanical part of the PPF-03 is shown in the left photograph. A wobble yoke mechanism is used on the reduced output shaft, and the phase angle, 90 degrees are set. In the first manufacturing, the frequency and motion of pectoral fins could be controled by a radio control system (R/C). However, the R/C system was removed soon, because the functions did not work well.
The mechanical part of the PPF-03 is shown in the left photograph. A wobble yoke mechanism is used on the reduced output shaft, and the phase angle, 90 degrees are set. In the first manufacturing, the frequency and motion of pectoral fins could be controled by a radio control system (R/C). However, the R/C system was removed soon, because the functions did not work well.
The belows figure shows a structure of the wobble yoke mechanism. A wobble shaft, which inclines to the central axis, is fixed to the reduced rotating shaft (output shaft). A bearing and a swash plate are set at outside of the wobble shat. The swash plate is limited to rotating motion by the slider. Thus, the plate has reciprocating motion in appearance with motion of the rotating shaft. Two rod-ends (ball joints) are set at outside of the swash plate. When the rod-ends are set with 90 degrees as shown in the figure of the left, two rods has 90 degrees of the phase angle.
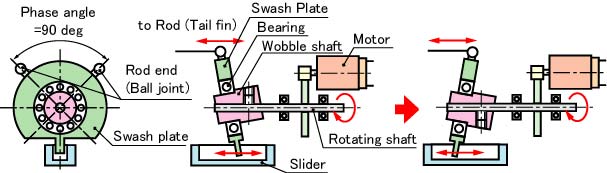
Structure of Wobble Yoke Mechanism
Video of the PPF-03
[ View of Model Fish Robots ]
[ Fish Robot Home Page ]
[ Power and Energy Engineering Division ]
[ Hirata HOME ]
[ NMRI HOME ]
|