柾宆嫑儘儃僢僩乽PPF-03乿
Updated on December 29, 1998 by Koichi Hirata

丂柾宆嫑儘儃僢僩乽Pre-Prototype Fish Robot, PPF-03乿(慡挿290mm丆慡廳検380g)偼丆栺1/50偵尭懍偟偨夞揮幃儌乕僞乮儈僯巐嬱梡乯傪巊梡偟偰旜暱偲旜傂傟傪90亱偺埵憡嵎偱摦偐偟偰偄傑偡丅儌乕僞傗揹抮傪杊悈梕婍乮戜強梡昳傪棳梡乯偵擖傟偰偁傞偨傔丆幚嵺偵悈偺拞偱偺摦嶌妋擣偑偱偒傑偡丅
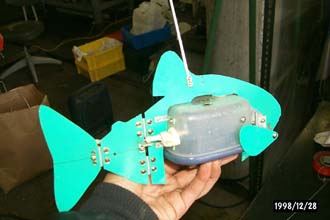 丂嵍偺幨恀偼丆PPF-03偺奜娤偱偡丅PPF-03傪帋嶌偟偨栚揑偼
丂嵍偺幨恀偼丆PPF-03偺奜娤偱偡丅PPF-03傪帋嶌偟偨栚揑偼
(1) 悈拞偱偺悇恑傪妋擣
(2) 嫑儘儃僢僩偺摦椡偵夞揮幃儌乕僞傪巊梡偟偨応崌偺栤戣揰偺専摙
(3) 嫑儘儃僢僩偺慁夞惈擻偺妋擣
偱偡丅
 丂嵍偺幨恀偼丆PPF-03傪悈拞偱摦偐偟偰偄傞偲偙傠偱偡丅儌乕僞偺尭懍偑廫暘偱側偐偭偨偨傔丆嬱摦僩儖僋偑晄懌偟偰偄傑偡偑丆旜暱偲旜傂傟傪栺4Hz偱怳摦偝偣傞偙偲偱丆栺0.2m/s偺懍搙偵払偡傞偙偲傪妋擣偟傑偟偨丅
丂嵍偺幨恀偼丆PPF-03傪悈拞偱摦偐偟偰偄傞偲偙傠偱偡丅儌乕僞偺尭懍偑廫暘偱側偐偭偨偨傔丆嬱摦僩儖僋偑晄懌偟偰偄傑偡偑丆旜暱偲旜傂傟傪栺4Hz偱怳摦偝偣傞偙偲偱丆栺0.2m/s偺懍搙偵払偡傞偙偲傪妋擣偟傑偟偨丅
 丂嵍偺幨恀偼丆PPF-03偺婡峔晹暘偱偡丅尭懍偝傟偨嬱摦幉偵梙摦僇儉婡峔傪庢傝晅偗傞偙偲偱丆旜暱偲旜傂傟偲偺摦偒偵90亱偺埵憡嵎傪偮偗偰偄傑偡丅帋嶌摉弶偼丆儔僕僐儞偵傛傝懍搙僐儞僩儘乕儖乮廃攇悢曄壔乯偍傛傃嫻傂傟偺奐暵塣摦傪偝偣傞偙偲偑偱偒傞傛偆偵偟偰偄傑偟偨偑丆尰嵼偱偼R/C憰抲傪庢傝奜偟偰偄傑偡丅
丂嵍偺幨恀偼丆PPF-03偺婡峔晹暘偱偡丅尭懍偝傟偨嬱摦幉偵梙摦僇儉婡峔傪庢傝晅偗傞偙偲偱丆旜暱偲旜傂傟偲偺摦偒偵90亱偺埵憡嵎傪偮偗偰偄傑偡丅帋嶌摉弶偼丆儔僕僐儞偵傛傝懍搙僐儞僩儘乕儖乮廃攇悢曄壔乯偍傛傃嫻傂傟偺奐暵塣摦傪偝偣傞偙偲偑偱偒傞傛偆偵偟偰偄傑偟偨偑丆尰嵼偱偼R/C憰抲傪庢傝奜偟偰偄傑偡丅
丂壓偺恾偼梙摦僇儉婡峔偺奣棯偱偡丅尭懍偝傟偨夞揮幉乮嬱摦幉乯偵偼丆梙摦幉偑拞怱幉偵懳偟偰幬傔偵屌掕偝傟偰偄傑偡丅偦偺奜懁偵偼儀傾儕儞僌偲幬斦偑庢傝晅偗傜傟偰偄傑偡丅幬斦偼丆僗儔僀僟偵傛偭偰夞揮曽岦傪墴偝偊傜傟偰偄傞偨傔丆夞揮幉偺夞揮塣摦偵敽偭偰媅帡揑側墲暅塣摦傪峴偄傑偡丅幬斦偺奜懁偵2偮偺儘僢僪僄儞僪乮僺儘儃乕儖乯傪90搙偺埵抲偵庢傝晅偗傞偲丆2杮偺儘僢僪偼90搙偺埵憡嵎偱墲暅塣摦傪峴偄傑偡丅
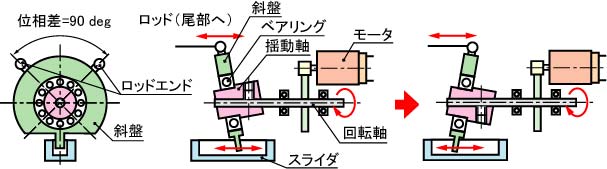
梙摦僇儉婡峔偺奣棯
PPF-03偺價僨僆
[ View of Model Fish Robots ]
[ Fish Robot Home Page ]
[ Power and Energy Engineering Division ]
[ Hirata HOME ]
[ NMRI HOME ]
|