Model Fish Robot, PPF-05
Updated on January 29, 1999 by Koichi Hirata

 From the experimental results of the PPF-04, it is made sure that the high frequency produces the high speed swimming. The motion of a R/C servo motor, like the PPF-04 is not suitable for the high frequency, because the servo motor turns over the rotation. On the other hand, a rotated motor, which has regular rotation is a suitable power source for th ehigh frequency. Model Fish Robot, PPF-05 uses a small D/C motor as the power source, and it can work with the high frequency.
From the experimental results of the PPF-04, it is made sure that the high frequency produces the high speed swimming. The motion of a R/C servo motor, like the PPF-04 is not suitable for the high frequency, because the servo motor turns over the rotation. On the other hand, a rotated motor, which has regular rotation is a suitable power source for th ehigh frequency. Model Fish Robot, PPF-05 uses a small D/C motor as the power source, and it can work with the high frequency.
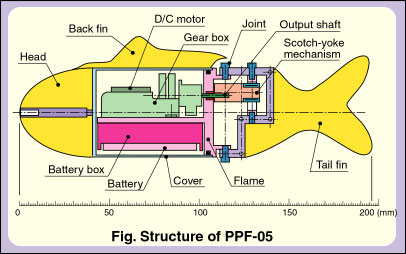 A length of the PPF-05 is 196 mm, a total weight is 245 g. The small D/C motor, a gear box and a battery box are located on an aluminum flame like a left figure. The flame is covered and sealed by a O-ring. An output shaft of the gear box is sealed by a Teflon tube (ID: 2 mm) simply. A tail part and a tail fin are made by one board of polypropylene (thickness: 0.75 mm).
A length of the PPF-05 is 196 mm, a total weight is 245 g. The small D/C motor, a gear box and a battery box are located on an aluminum flame like a left figure. The flame is covered and sealed by a O-ring. An output shaft of the gear box is sealed by a Teflon tube (ID: 2 mm) simply. A tail part and a tail fin are made by one board of polypropylene (thickness: 0.75 mm).
 The rotating motion of the output shaft is changed to vibration of the tail part by a Scotch-yoke mechanism. The maximum amplitude is 5.7 degrees (=tan-10.1) constant. A phase angle between the tail part and the tail fin is effected by the force to the tail and the elasticity of the polypropylene.
The rotating motion of the output shaft is changed to vibration of the tail part by a Scotch-yoke mechanism. The maximum amplitude is 5.7 degrees (=tan-10.1) constant. A phase angle between the tail part and the tail fin is effected by the force to the tail and the elasticity of the polypropylene.
[ View of Model Fish Robots ]
[ Fish Robot Home Page ]
[ Power and Energy Engineering Division ]
[ Hirata HOME ]
[ NMRI HOME ]
|